,选择MSI版本下载并安装即可Ubuntu
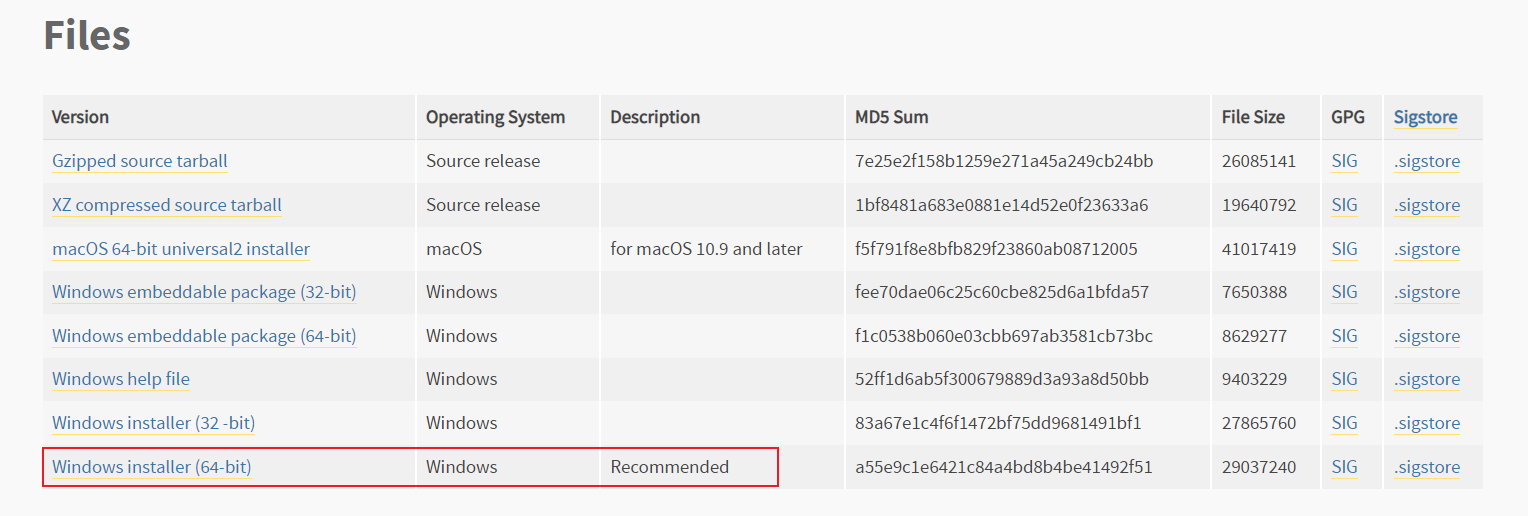
注意:安装过程中记得勾选自动添加到环境变量
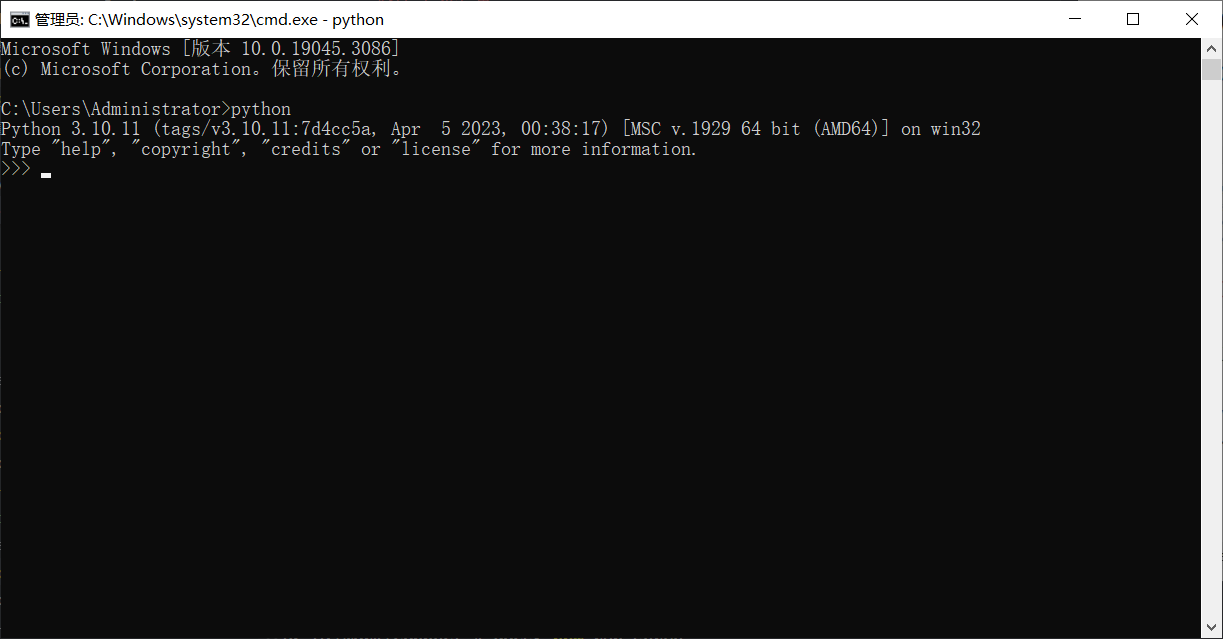
安装完毕后,Win+R打开运行,输入CMD,在弹出的CMD窗口中输入python以检查是否成功
Ubuntu配置项目环境
按顺序执行以下命令
git clone https://github.com/elephantrobotics/Connect-4-Kit.git
cd Connect-4-Kit
根据平台安装使用对应的requirements list
如果是Windows平台请运行:
pip install -r .\requirements_windows.txt
如果是Linux平台请运行:
pip install -r .\requirements_linux.txt
检查机械臂的固件版本
MyCobot 280机械臂的固件版本需大于6.3 MyArm机械臂的固件版本至少为1.0
如果不满足,请使用mystudio更新到最新版。