# myCobot 320 for M5

### 1 结构参数
#### 1.1 机械臂参数
| 指标 | 参数 |
| ------------ | --------------------------- |
| 名称 | 小象协作机械臂 |
| 型号 | myCobot 320-M5 |
| 有效工作半径 | 320mm |
| 负载 | 1kg |
| 有效臂展 | 320mm |
| 重复定位精度 | ±0.5mm |
| 自重 | 3kg |
| 电源输入 | 24V,5A |
| 工作环境 | -5°~45° |
| 通信 | 网口母口
USB Type-C |
| 底座IO | D-INPUT x2
D-OUTPUT x3 |
| 工具端IO | D-INPUT x2
D-OUTPUT x3 |
#### 1.2 工作空间
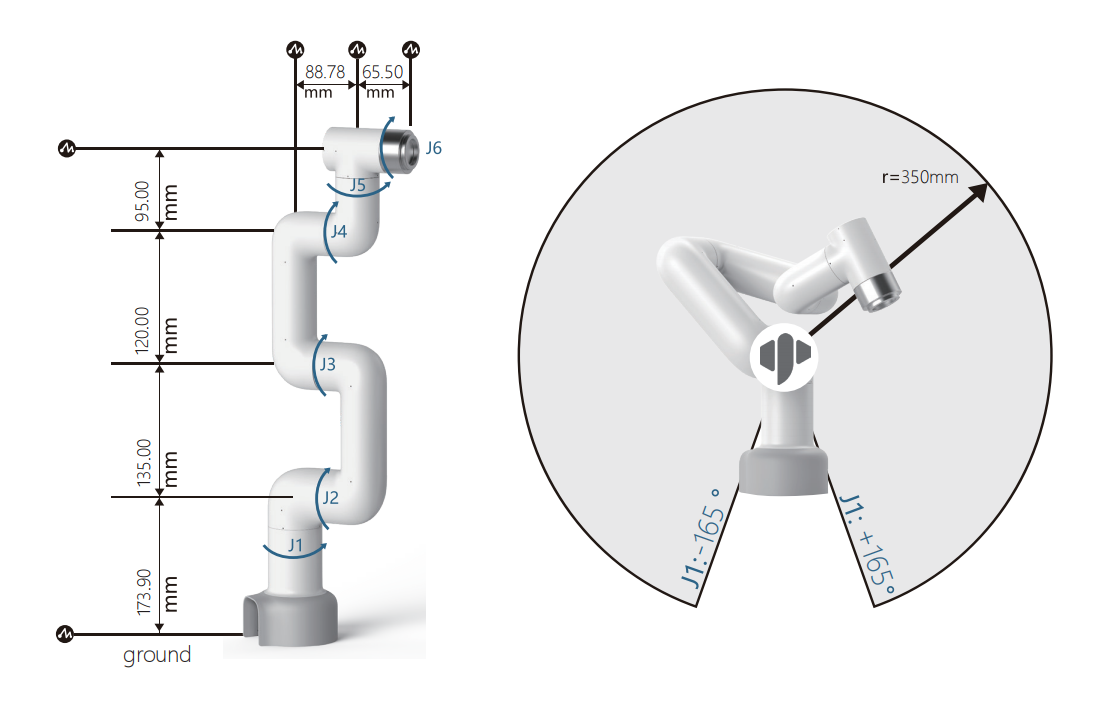
#### 1.3 关节运动范围
| 关节 | 范围 |
| :--------- | :--------------|
| J1 | -165~ +165 |
| J2 | -165~ +165 |
| J3 | -165~ +165 |
| J4 | -165~ +165 |
| J5 | -165~ +165 |
| J6 | -175 ~ +175 |
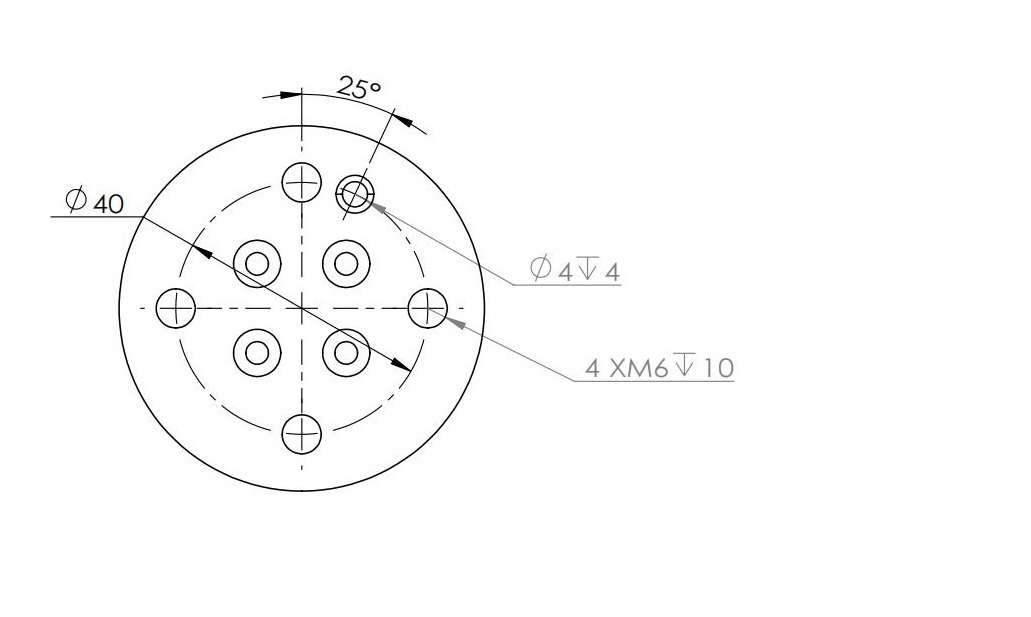
#### 1.4 孔位安装
- 机器人末端安装法兰
机械臂末端兼容螺丝螺纹孔。
### 2 电子参数
| 指标 | 参数 |
| :--------- | :------ |
| 主控 | ESP32 |
| 辅控 | ESP32*2 |
| 蓝牙/无线 | 有 |
| TYPE-C | x1 |
| 显示屏幕 | 有 |
| 自定义按键 | 有 |
| IO接口 | 4个 |
| 紧急停止 | 有 |
| LED | 2寸 |