# **基于Python API开发**
大象提供了Python API来远程控制机器人,我们使用TCP协议来在客户端和机器人之间进行通信,因此在使用我们的API之前,您需要按照文档操作以下内容。
## **1 环境搭建**
### 1.1 安装Python
> **注意:**安装之前,请先确认您的电脑是64位还是32位。右键点击`我的电脑`,选择`属性`。如下图显示是64位的操作系统,所以选择64位的Python安装包。
>
>  >
>
>
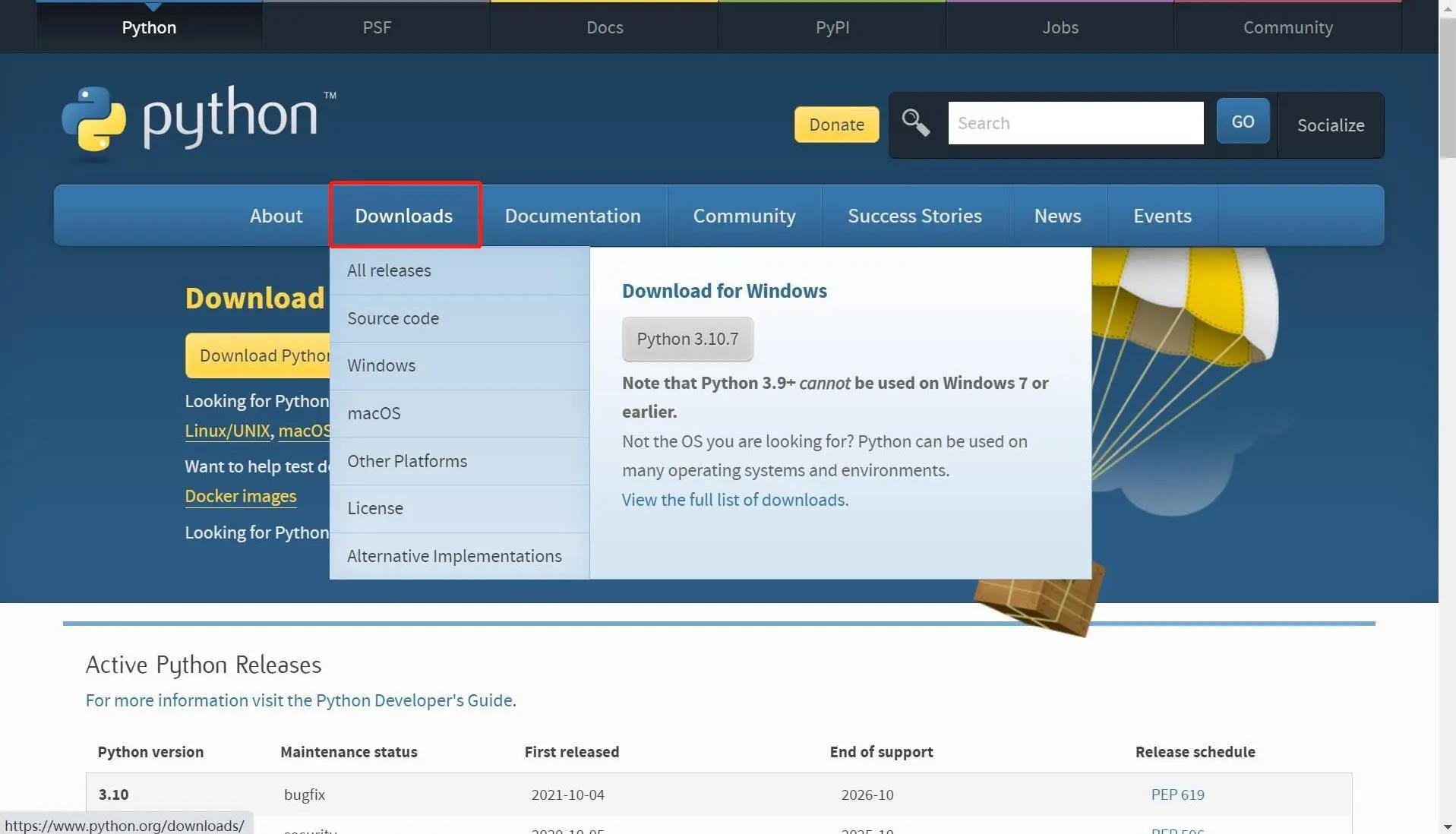
>  * **Python官方下载地址: https://www.python.org/downloads/**
* **点击`Downloads`选项,开始下载Python,点击`Add Python 3.10 to PATH`,点击`Install Now`,开始安装Python**
* **Python官方下载地址: https://www.python.org/downloads/**
* **点击`Downloads`选项,开始下载Python,点击`Add Python 3.10 to PATH`,点击`Install Now`,开始安装Python**

 * **出现“Setup was successful”提示,说明安装完成**
* **出现“Setup was successful”提示,说明安装完成**
 ### 1.2 运行Python
安装成功后,打开命令提示符窗口(Win+R,输入cmd回车),敲入`python`后,会出现两种情况。
**情况一:**
### 1.2 运行Python
安装成功后,打开命令提示符窗口(Win+R,输入cmd回车),敲入`python`后,会出现两种情况。
**情况一:**
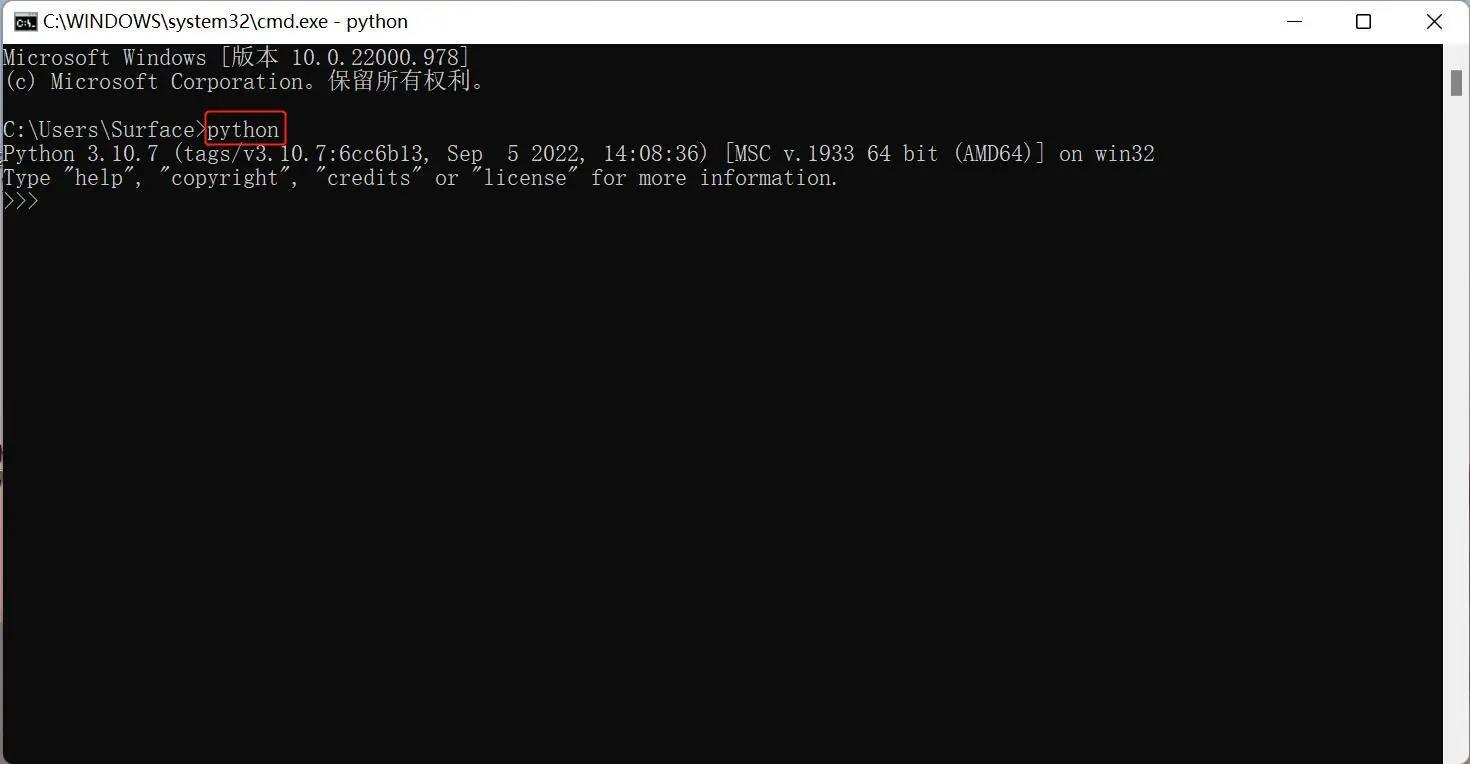 出现图片中的提示表示Python安装成功。
出现提示符`>>>` 就表示我们已经在Python交互式环境中了,可以输入任何Python代码,回车后会立刻得到执行结果。
**情况二:**
假如输入错误(比如输入pythonn),则会出现错误提示:
出现图片中的提示表示Python安装成功。
出现提示符`>>>` 就表示我们已经在Python交互式环境中了,可以输入任何Python代码,回车后会立刻得到执行结果。
**情况二:**
假如输入错误(比如输入pythonn),则会出现错误提示:
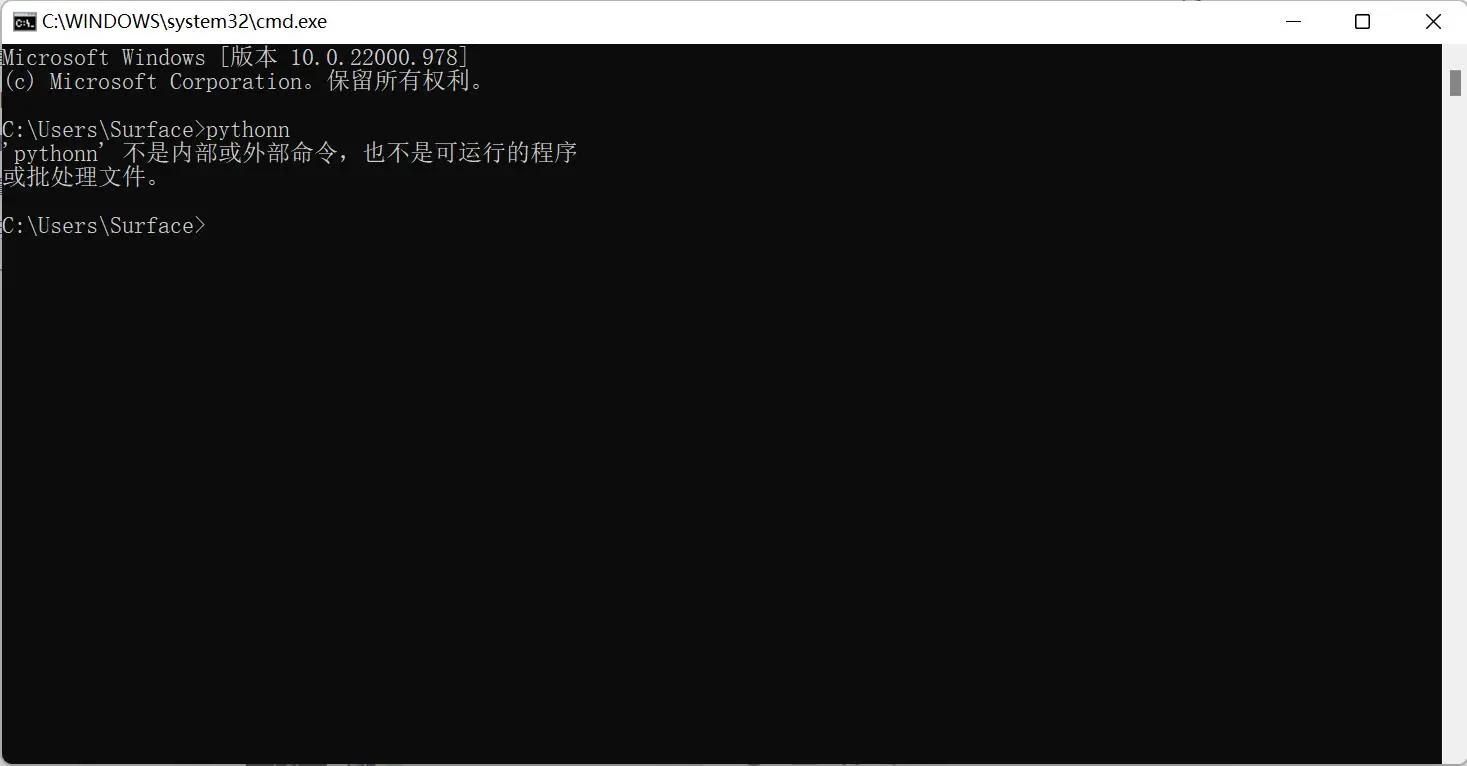 > **注意:**出现错误的信息一般都是没有配置环境变量导致的,可以参考**1.3 配置环境变量**修改环境变量。
### 1.3 配置环境变量
由于Windows会根据一个Path的环境变量设定的路径去查找python.exe,如果没找到,就会报错。因此,如果安装时漏掉了勾选`Add Python 3.10 to PATH`,则需要手动把python.exe所在的路径添加到Path中,或者重新安装一遍Python,记得勾选上`Add Python 3.10 to PATH`选项即可。
以下是手动添加python.exe所在的路径步骤。
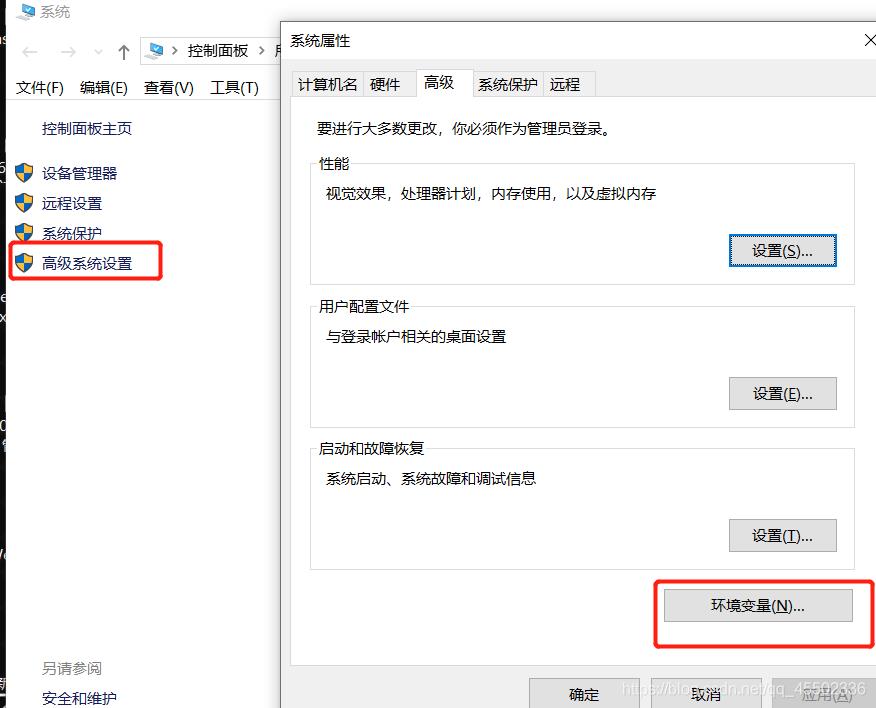
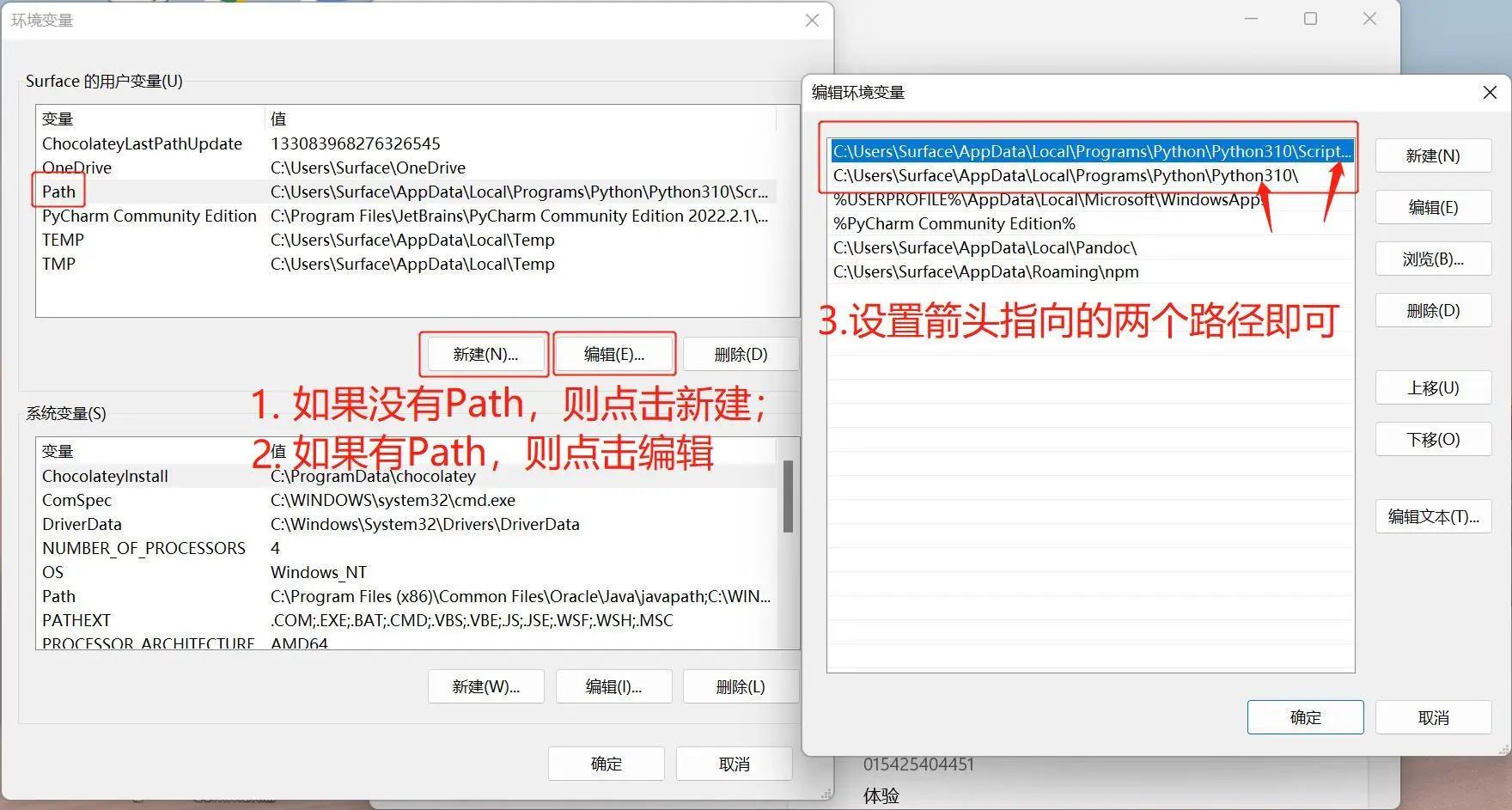
* 右键我的电脑–>选择属性–>选择高级系统设置–>选择右下角的环境变量:
> **注意:**出现错误的信息一般都是没有配置环境变量导致的,可以参考**1.3 配置环境变量**修改环境变量。
### 1.3 配置环境变量
由于Windows会根据一个Path的环境变量设定的路径去查找python.exe,如果没找到,就会报错。因此,如果安装时漏掉了勾选`Add Python 3.10 to PATH`,则需要手动把python.exe所在的路径添加到Path中,或者重新安装一遍Python,记得勾选上`Add Python 3.10 to PATH`选项即可。
以下是手动添加python.exe所在的路径步骤。
* 右键我的电脑–>选择属性–>选择高级系统设置–>选择右下角的环境变量:
 * 环境变量主要有包括用户变量和系统变量,需要设置的环境变量就在这两个变量中。如下图所示:
* 环境变量主要有包括用户变量和系统变量,需要设置的环境变量就在这两个变量中。如下图所示:
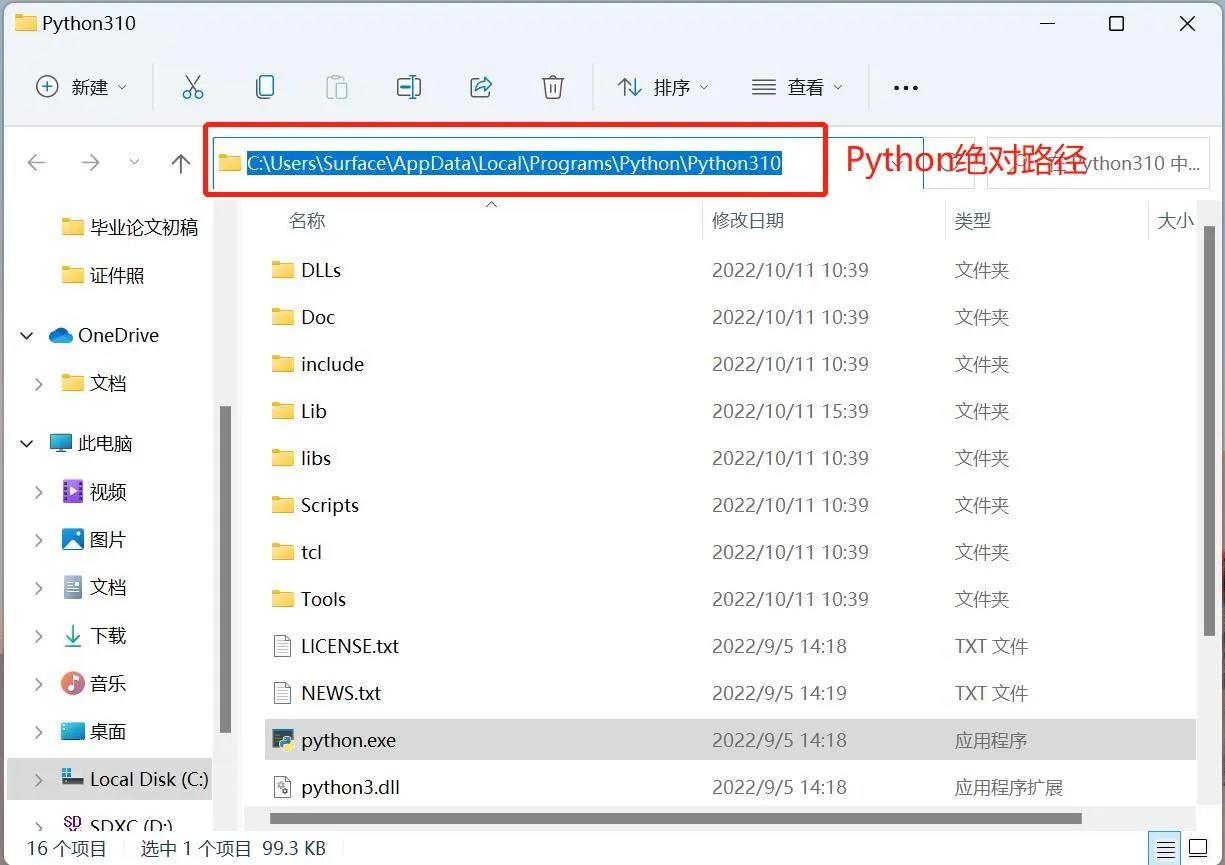
 * 用户变量是将自己的下载的程序可以在cmd命令中使用。把程序的绝对路径写到用户变量中即可使用,如下图所示:
* 用户变量是将自己的下载的程序可以在cmd命令中使用。把程序的绝对路径写到用户变量中即可使用,如下图所示:
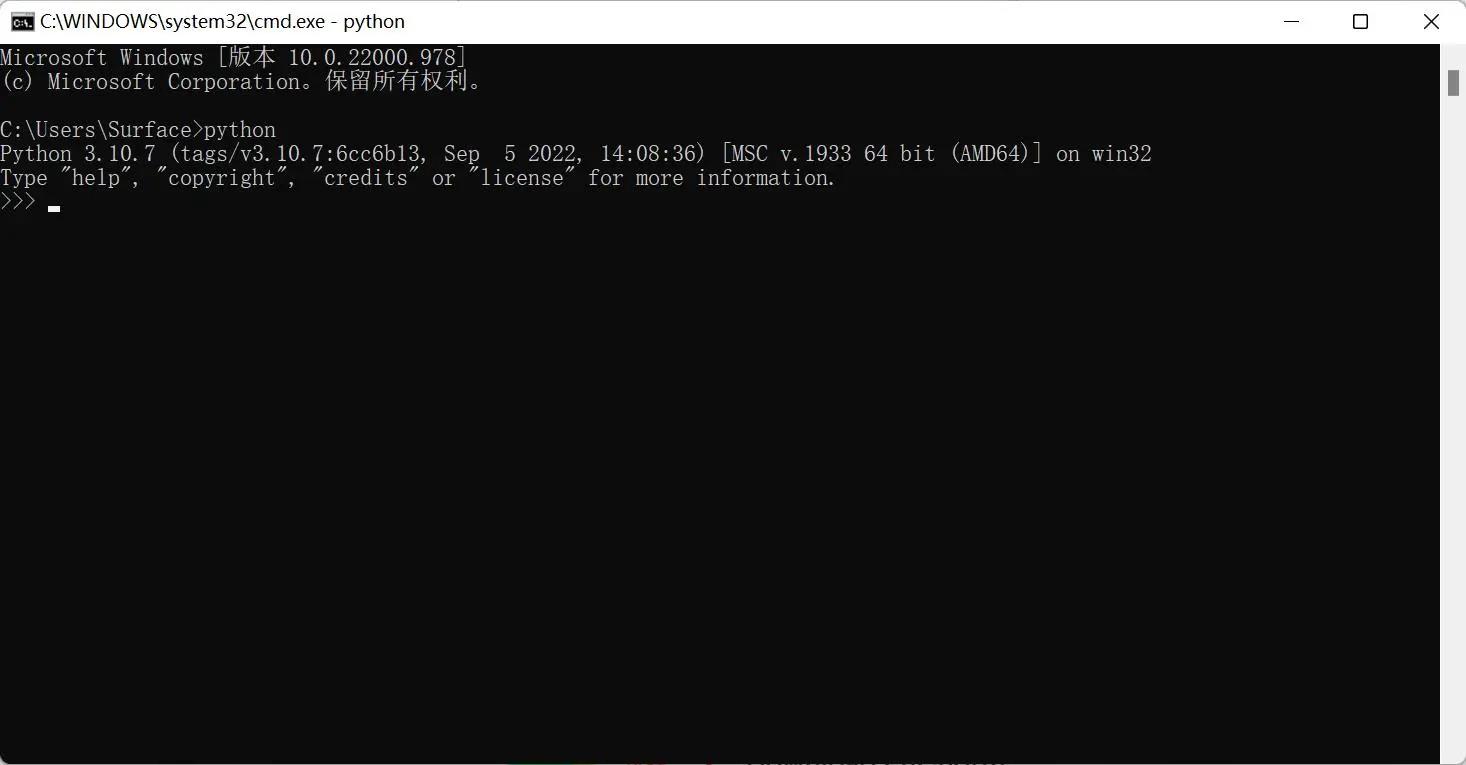
 * 以上步骤完成后,打开命令提示符窗口(Win+R,再输入cmd,回车),敲入Python,出现下图中的提示表示成功:
* 以上步骤完成后,打开命令提示符窗口(Win+R,再输入cmd,回车),敲入Python,出现下图中的提示表示成功:
 ### 1.4 pymycobot安装
* pymycobot安装。打开一个控制台终端(快捷键Win+R,输入cmd进入终端),输入以下命令后按键盘回车键进行安装:
```python
pip install pymycobot --upgrade --user
```
### 1.4 pymycobot安装
* pymycobot安装。打开一个控制台终端(快捷键Win+R,输入cmd进入终端),输入以下命令后按键盘回车键进行安装:
```python
pip install pymycobot --upgrade --user
```
 ## 2 **开启TCP服务器功能**
### **2.1登录RoboFlow操作系统**
机器人上电开机后,使用VNC Viewer进入树莓派,登录RoboFlow操作系统
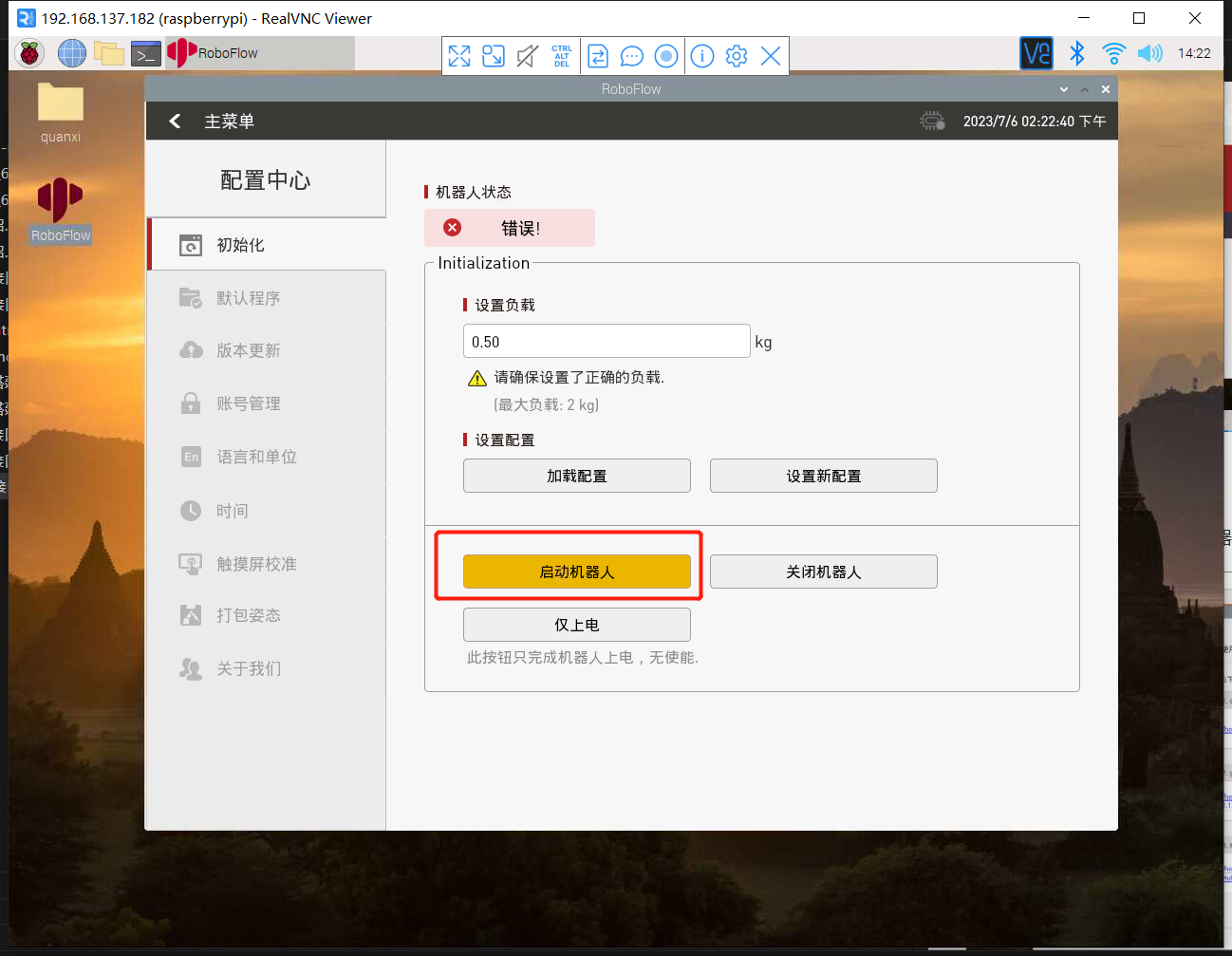
### **2.2启动机器人**
进入配置中心,点击启动机器人按钮
## 2 **开启TCP服务器功能**
### **2.1登录RoboFlow操作系统**
机器人上电开机后,使用VNC Viewer进入树莓派,登录RoboFlow操作系统
### **2.2启动机器人**
进入配置中心,点击启动机器人按钮
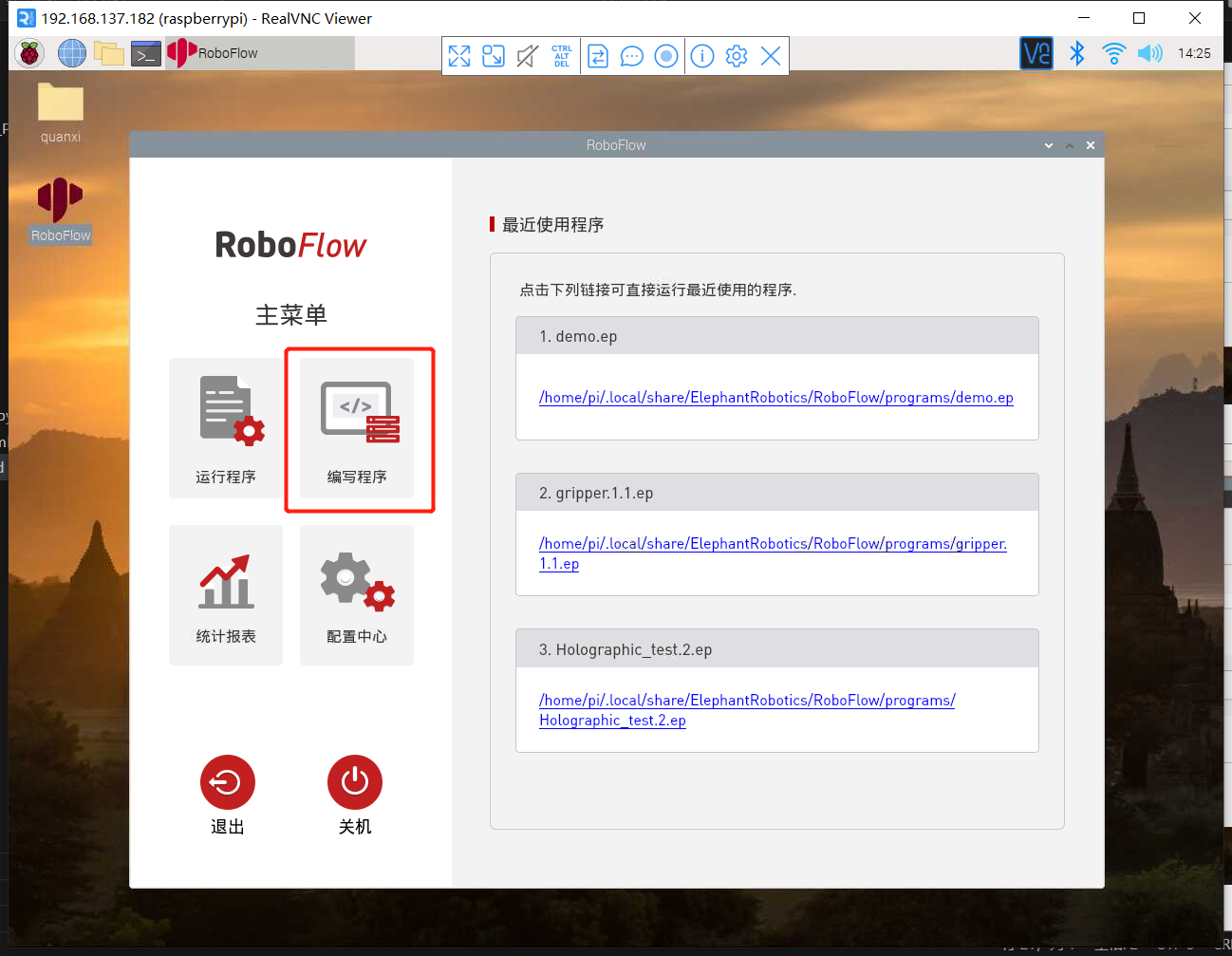
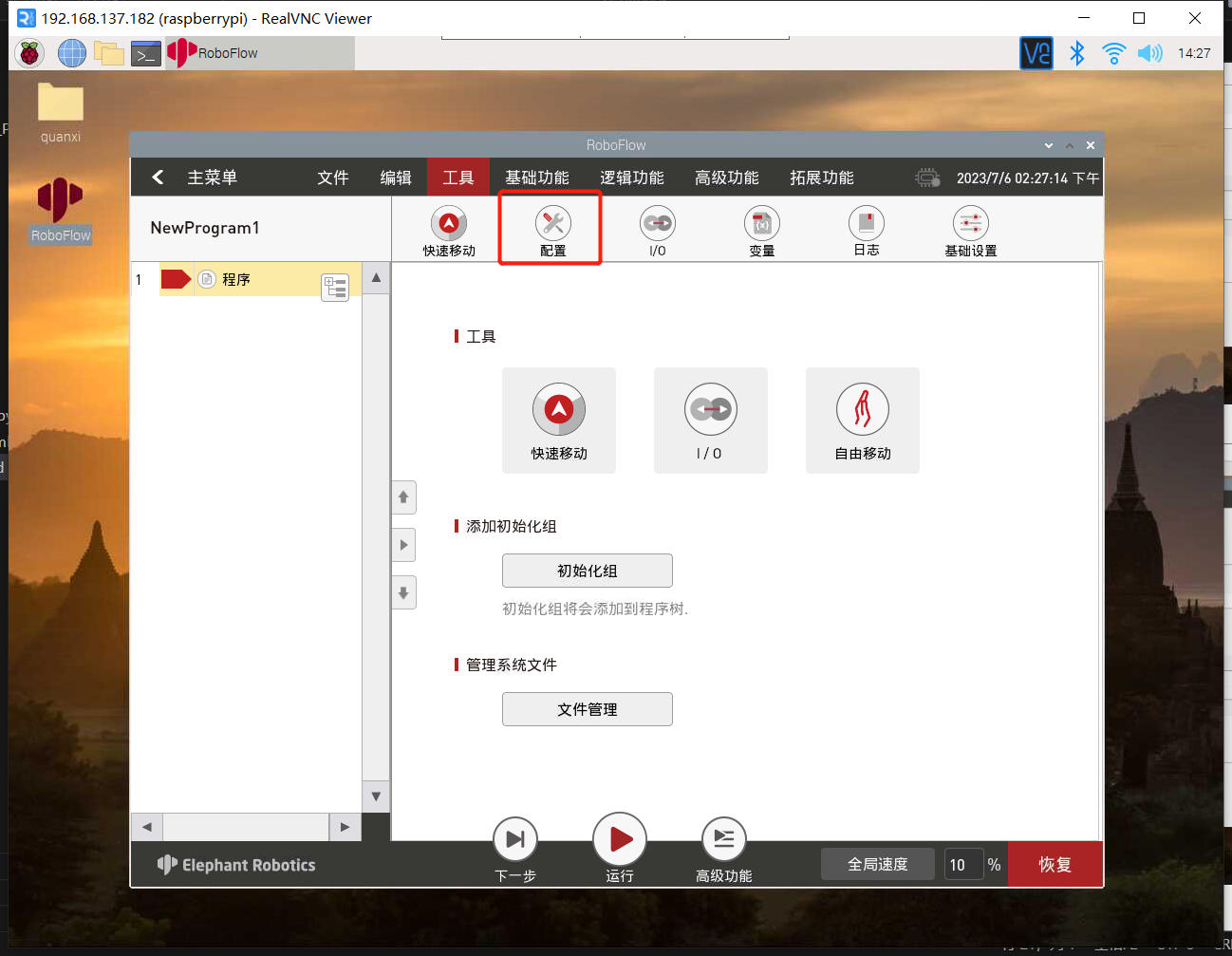
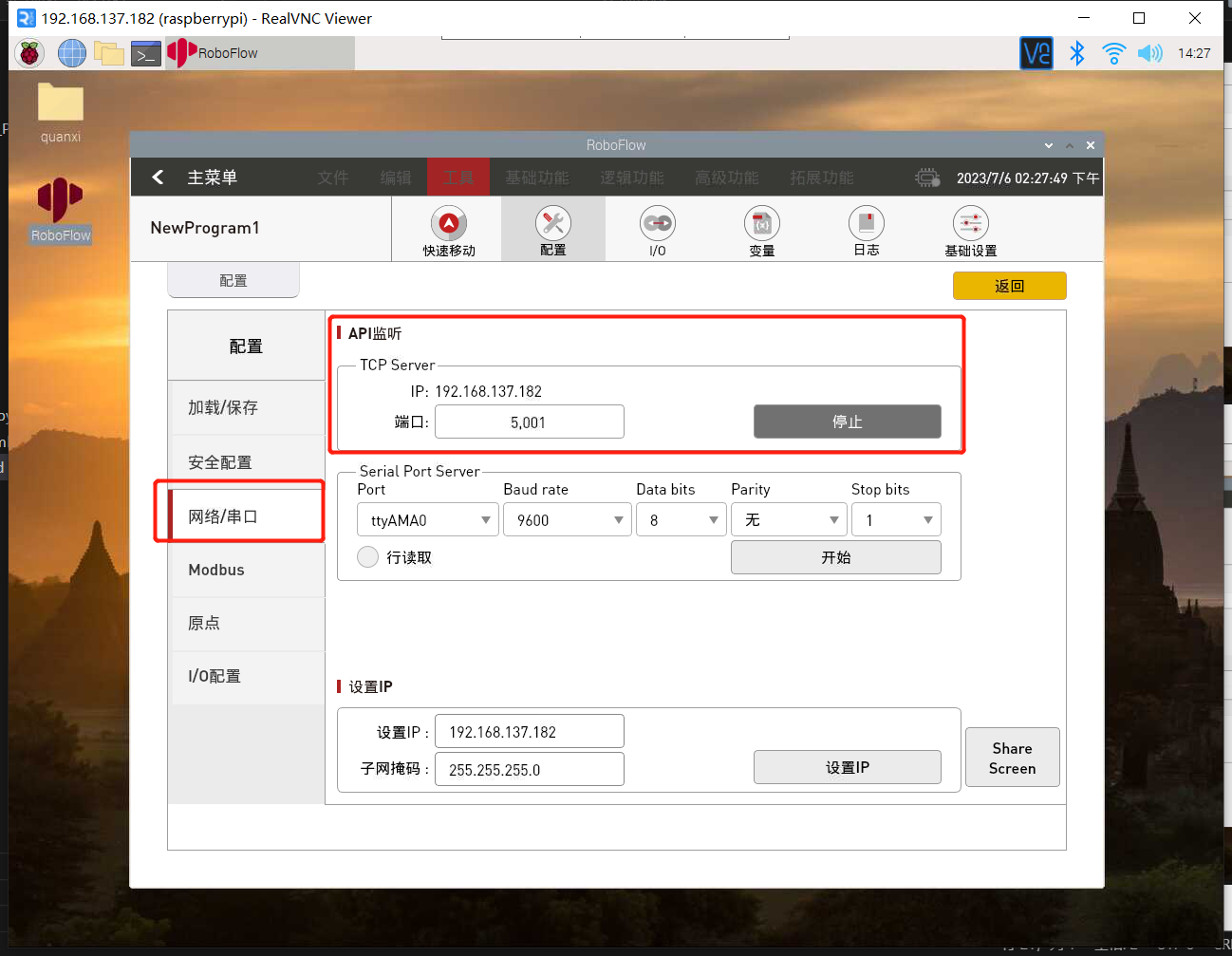
### **2.3检查TCP服务器是否开启**
返回主菜单,点击编写程序后,再点击空白程序,进入程序编辑界面后,点击配置按钮,点击网络/串口选项,检查TCP服务器是否开启,通常情况下,**TCP服务器是默认开启的**,若未开启,则需手动开启
## 3 **Python API接口说明**
### 3.1 ElephantRobot类实列化
```
"从pymycobot库导入ElephantRobot类"
from pymycobot import ElephantRobot
"连接机器人服务器"
elephant_client = ElephantRobot("192.168.137.182", 5001)
"开始TCP通信"
elephant_client.start_client()
```
**使用Python API必须先将ElephantRobot类实例后才可调用mycobot pro600的功能函数**
- **必填参数**:
**参数1**:机器人实际IP地址
**参数2**:机器人端口(**API函数端口固定为5001**)
### 3.2功能函数介绍
**def start_client()**:
- **功能**:开启TCP连接(**若要使用Python API控制机器人,必须调用此API**)
- **参数**:无
**def stop_client()**:
- **功能**:关闭TCP连接
- **参数**:无
**def send_command(command)**:
- **功能**:发送指令给服务器
- **参数**:指令(字符串类型)
**def string_to_coords(data)**:
- **功能**:字符串类型数据转列表类型数据
- **参数**:字符串类型数据
**def string_to_double(data)**:
- **功能**:字符串类型数据转双精度浮点型数据
- **参数**:字符串类型数据
**def string_to_int(data)**:
- **功能**:字符串类型数据转整型数据
- **参数**:字符串类型数据
**def invalid_coords()**:
- **功能**:给服务器返回一个无效的笛卡尔坐标
- **参数**:无
**def get_angles()**:
- **功能**:向服务器请求当前各个关节角度信息
- **参数**:无
**def get_coords()**:
- **功能**:向服务器请求当前笛卡尔位姿信息
- **参数**:无
**def get_speed()**:
- **功能**:向服务器请求机器人运动速率
- **参数**:无
**def power_on()**:
- **功能**:机器人上电
- **参数**:无
**def power_off()**:
- **功能**:机器人下电
- **参数**:无
**def check_running()**:
- **功能**:检查机器人是否在运行
- **参数**:无
**def state_check()**:
- **功能**:获取机器人状态
- **参数**:无
**def read_next_error(data)**:
- **功能**:机器人错误检测
- **参数**:无
**def write_coords(coords,speed)**:
- **功能**:发送整体坐标和姿态,让机械臂头部从原来点移动到指定点
- **参数**:机器人笛卡尔位姿(列表类型),机械臂运动的速度
**def write_coord(axis, value, speed)**:
- **功能**:发送单个坐标值给机械臂进行移动
- **参数**:机器人笛卡尔位置[0代表x,1代表y,2代表z,3代表rx,4代表ry,5代表rz],要到达的坐标值,机械臂运动的速度
**def write_angles(angles,speed)**:
- **功能**:发送所有角度给机械臂所有关节
- **参数**:关节角度(列表类型),机械臂运动的速度
**def write_angle(joint, value, speed)**:
- **功能**:发送指定的单个关节运动至指定的角度
- **参数**:指定关节[0代表j1,1代表j2,2代表j3,3代表j4,4代表j5,5代表j6],关节角度,机械臂运动的速度
**def set_speed(percentage)**:
- **功能**:设置速度
- **参数**:目标速度
**def set_carte_torque_limit(axis_str, value)**:
- **功能**:设置机器人的扭矩限制
- **参数**:x/y/z/rx /ry/rz,扭矩
**def set_payload(payload)**:
- **功能**:设置机器人的有效负载
- **参数**:范围 0.0 ~ 2.0
**def state_on()**:
- **功能**:启动系统
- **参数**:无
**def state_off()**:
- **功能**:关闭系统
- **参数**:无
**def task_stop()**:
- **功能**:任务暂停
- **参数**:无
**def jog_angle(joint_str, direction, speed)**:
- **功能**: 控制机器人按照指定的角度持续移动
- **参数**:机械臂的关节[J1/J2/J3/J4/J5/J6],主要控制机器臂移动的方向[-1=负方向 ,0=停止,1=正方向],机器人运动的速度
**def jog_coord(axis_str, direction, speed)**:
- **功能**: 控制机器人按照指定的坐标轴方向持续移动
- **参数**:笛卡尔的方向[x/y/z/rx/ry/rz],主要控制机器臂移动的方向[-1=负方向 ,0=停止,1=正方向],机器人运动的速度
**def get_digital_in(pin_number)**:
- **功能**:获取输入引脚信号
- **参数**:引脚序号
**def get_digital_out(pin_number)**:
- **功能**:获取输出引脚信号
- **参数**:引脚序号
**def set_digital_out(pin_number, pin_signal)**:
- **功能**:设置输出引脚信号
- **参数**:引脚序号,引脚状态[0=低电平,1=高电平]
**def get_acceleration()**:
- **功能**:获取机器人的加速度
- **参数**:无
**def set_acceleration(acceleration)**:
- **功能**:设置机器人的加速度
- **参数**:加速度
**def command_wait_done()**:
- **功能**:等待到上一个运动命令完成为止(**此API函数必须添加到所有运动API函数后面**)
- **参数**:无
**def wait(seconds)**:
- **功能**:等待时长(以秒为单位)
- **参数**:无
**def assign_variable(var_name, var_value)**:
- **功能**:给定义好的变量赋值
- **参数**:变量名(字符串类型),目标值
**def get_variable(var_name)**:
- **功能**:获取一个变量的值
- **参数**:变量名(字符串类型)
## 4 **Python API使用案例**
### 4.1 **关节控制**
使用VNC Viewer进入RoboFlow系统后,在快速移动界面下,可通过关节控制,控制机器人到达目标位置后,记录操作面板上显示的机器人6个关节的角度
#### 4.1.1 **多关节控制**
```
from pymycobot import ElephantRobot
if __name__=='__main__':
"连接机器人服务器"
elephant_client = ElephantRobot("192.168.137.182", 5001)
"开启TCP通信"
elephant_client.start_client()
"在列表内填入记录下的6个关节角度,最后一个参数为运动速度"
elephant_client.write_angles([94.828,-143.513,135.283,-82.969,-87.257,-44.033],1000)
"等待机器人运动到目标位置再执行后续指令"
elephant_client.command_wait_done()
```
#### 4.1.2 **单关节控制**
```
from pymycobot import ElephantRobot
if __name__=='__main__':
"连接机器人服务器"
elephant_client = ElephantRobot("192.168.137.182", 5001)
"开启TCP通信"
elephant_client.start_client()
"填入要控制的单个关节的角度,第1个参数0为第一轴,以此类推;第2个参数表示关节角度;第三个参数表示运动速度"
elephant_client.write_angle(0,94.828,1000)
"等待机器人运动到目标位置再执行后续指令"
elephant_client.command_wait_done()
```
#### 4.1.3 **关节角度获取**
```
from pymycobot import ElephantRobot
if __name__=='__main__':
"连接机器人服务器"
elephant_client = ElephantRobot("192.168.137.182", 5001)
"开启TCP通信"
elephant_client.start_client()
"打印机器人当前6个关节角度信息"
elephant_client.get_angles()
"等待机器人运动到目标位置再执行后续指令"
elephant_client.command_wait_done()
```
### 4.2 **坐标控制**
主要用于实现智能规划路线让机械臂从一个位置到另一个指定位置。分为[x,y,z,rx,ry,rz],其中[x,y,z]表示的是机械臂头部在空间中的位置(该坐标系为直角坐标系),[rx,ry,rz]表示的是机械臂头部在该点的姿态(该坐标系为欧拉坐标)
使用VNC Viewer进入RoboFlow系统后,在快速移动界面下,可通过笛卡尔坐标控制,控制机器人到达目标位置后,记录操作面板上显示的机器人6个坐标值
#### 4.2.1 **多参数坐标控制**
```
from pymycobot import ElephantRobot
if __name__=='__main__':
"连接机器人服务器"
elephant_client = ElephantRobot("192.168.137.182", 5001)
"开启TCP通信"
elephant_client.start_client()
"在列表内填入记录下的6个坐标值,最后一个参数为运动速度"
elephant_client.write_coords([-130.824,256.262,321.533,176.891,-0.774,-128.700], 3000)
"等待机器人运动到目标位置再执行后续指令"
elephant_client.command_wait_done()
```
#### 4.2.2 **单参数坐标控制**
```
from pymycobot import ElephantRobot
if __name__=='__main__':
"连接机器人服务器"
elephant_client = ElephantRobot("192.168.137.182", 5001)
"开启TCP通信"
elephant_client.start_client()
"填入参数,第1个参数的2代表Z轴方向,以此类推;第2个参数表示关坐标值;第三个参数表示运动速度"
elephant_client.write_coord(2,94.828,3000)
"等待机器人运动到目标位置再执行后续指令"
elephant_client.command_wait_done()
```
#### 4.2.3 **笛卡尔空间坐标获取**
```
from pymycobot import ElephantRobot
if __name__=='__main__':
"连接机器人服务器"
elephant_client = ElephantRobot("192.168.137.182", 5001)
"开启TCP通信"
elephant_client.start_client()
"打印输出机器人当前笛卡尔空间坐标信息"
elephant_client.get_coords()
"等待机器人运动到目标位置再执行后续指令"
elephant_client.command_wait_done()
```
### 4.3 **IO控制**
#### 4.3.1 **设置IO引脚输出状态**
```
from pymycobot import ElephantRobot
if __name__=='__main__':
"连接机器人服务器"
elephant_client = ElephantRobot("192.168.137.182", 5001)
"开启TCP通信"
elephant_client.start_client()
"控制机器人OUT1输出为高电平"
elephant_client.set_digital_out(0,1)
"机器人延时3秒后再执行后面程序"
elephant_client.wait(3)
"控制机器人OUT1输出为低电平"
elephant_client.set_digital_out(0,0)
"机器人延时3秒后再执行后面程序"
elephant_client.wait(3)
```
#### 4.3.1 **获取IO引脚输出状态**
```
from pymycobot import ElephantRobot
if __name__=='__main__':
"连接机器人服务器"
elephant_client = ElephantRobot("192.168.137.182", 5001)
"开启TCP通信"
elephant_client.start_client()
"获取机器人OUT1输出状态"
elephant_client.get_digital_out(0)
"机器人延时0.5秒后再执行后面程序"
elephant_client.wait(0.5)
```
#### 4.3.1 **获取IO引脚输入状态**
```
from pymycobot import ElephantRobot
if __name__=='__main__':
"连接机器人服务器"
elephant_client = ElephantRobot("192.168.137.182", 5001)
"开启TCP通信"
elephant_client.start_client()
"获取机器人IN1输入状态"
elephant_client.get_digital_in(0)
"机器人延时0.5秒后再执行后面程序"
elephant_client.wait(0.5)
```
## 5 **Python API应用场景案例**
### 5.1 **搬运码垛**
```
from pymycobot import ElephantRobot
if __name__=='__main__':
"连接机器人服务器"
elephant_client = ElephantRobot("192.168.137.182", 5001)
"开启TCP通信"
elephant_client.start_client()
for i in range (1):
"机器人关节运动到安全点"
elephant_client.write_angles([94.828,-143.513,135.283,-82.969,-87.257,-44.033],1000)
"等待机器人运动到目标位置再执行后续指令"
elephant_client.command_wait_done()
"机器人笛卡尔运动到码垛抓取过渡点"
elephant_client.write_coords([-130.824,256.262,321.533,176.891,-0.774,-128.700], 3000)
elephant_client.command_wait_done()
"控制机器人朝Z轴方向笛卡尔运动到码垛抓取点"
elephant_client.write_coord(2,241.533,3000)
elephant_client.command_wait_done()
"控制机器人OUT1输出为高电平"
elephant_client.set_digital_out(0,1)
"控制机器人等待1秒后再动作"
elephant_client.wait(1)
"控制机器人朝Z轴方向笛卡尔运动到码垛抓取过渡点"
elephant_client.write_coord(2,321.533,3000)
elephant_client.command_wait_done()
"控制机器人运动到放置过渡点"
elephant_client.write_coords([86.687,255.542,320.867,177.065,-1.333,-128.721], 3000)
elephant_client.command_wait_done()
"控制机器人朝Z轴方向笛卡尔运动到码垛放置点"
elephant_client.write_coord(2,241.533,3000)
elephant_client.command_wait_done()
"控制机器人OUT1输出为低电平"
elephant_client.set_digital_out(0,0)
elephant_client.wait(1)
"控制机器人朝Z轴方向笛卡尔运动到码垛放置过渡点"
elephant_client.write_coord(2,321.533,3000)
elephant_client.command_wait_done()
"机器人关节运动到安全点"
elephant_client.write_angles([94.828,-143.513,135.283,-82.969,-87.257,-44.033],1000)
elephant_client.command_wait_done()
```