


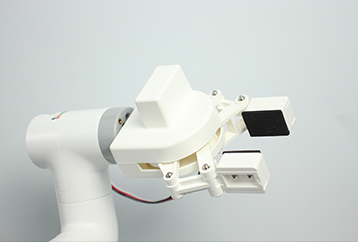
Adaptive Gripper
Applicable to a variety of consumer robotic arms, using serial communication control, can automatically adapt to the width of the clamping object, provide a variety of programming language control interfaces.
Applicable products
myCobot 280
mechArm 270
myPalletizer 260

myArm 300
Product parameters
| Model | myCobot Adaptive gripper | Hardware connection method | Lego connector |
| Payload | 150g | ||
| Stroke | 20-45mm | Power | Electric |
| Positioning precision | ±1mm | Materials | ABS plastic |
| Size | 112*94*50mm | Transmission | Gear + connecting rod |
| Weight | 100g | Working lifespan | 1 year |
| Control interface | IO interface | Working environment requirements | -5-45℃ |
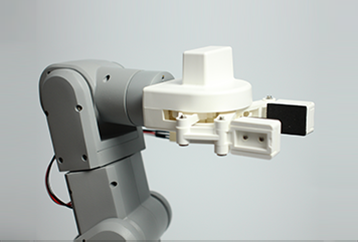
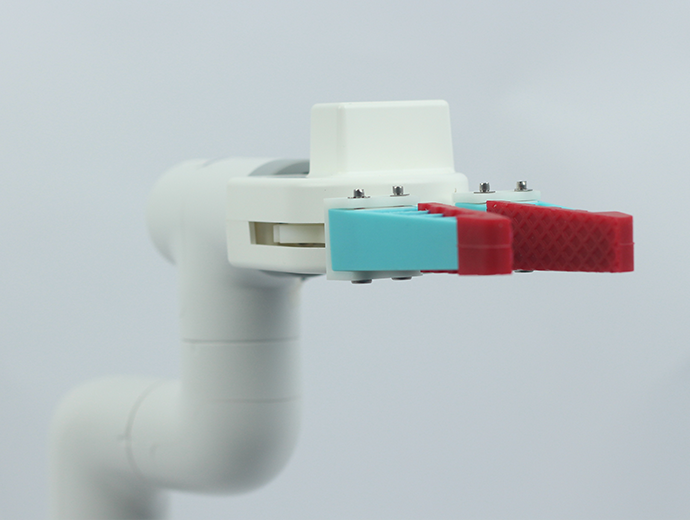
Flexible Gripper
Flexible rubber material deformable fingertip design, suitable for irregularly shaped objects, can produce deformation between them, with simple control methods, and can be used for various types of robots.
Applicable products
myCobot 280

mechArm 270

myPalletizer 260

myArm 300
Product parameters
| Model | myCobot Flexible gripper |
| Manufacturing Process | ABS + 3D |
| Color | White |
| Clamp Size | 0-900º |
| Clamp force | 100g |
| Positioning precision | ±1mm |
| Working lifespan | 1 year |
| Power | Electric |
| Drivetrain | Gear + Linkage |
| Size | 132X173X50mm |
| Weight | 100g |
| Fixed | LEGO connector |
| Environment of use | RTP(Room Temperature and Pressure) |
| Control | Serial contro |
| Compatible devices | ER myCobot 280 Series ER myPalletizer 260 Series ER mechArm 270 Series ER myBuddy 280 Series ER myArm 300 |
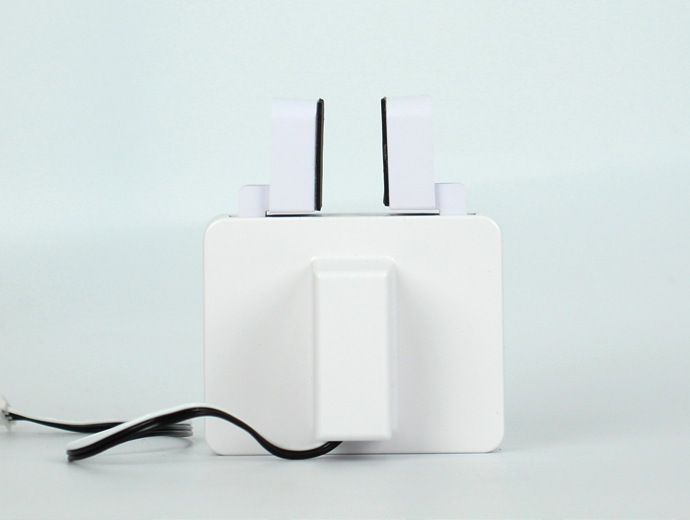
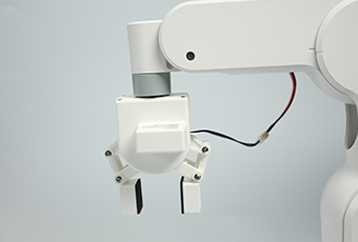
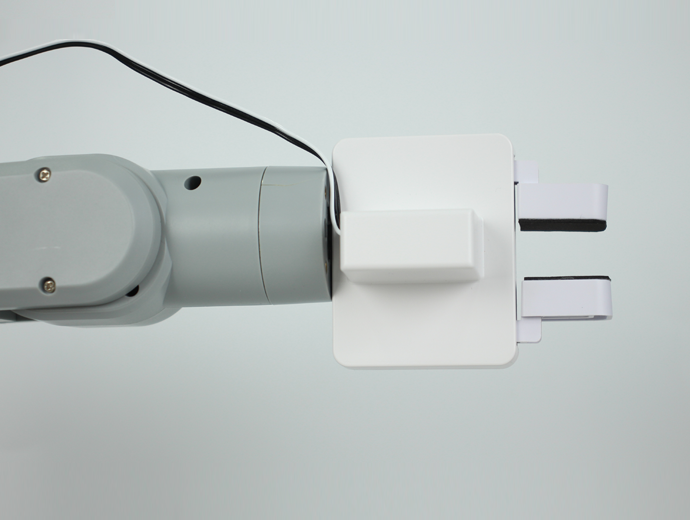
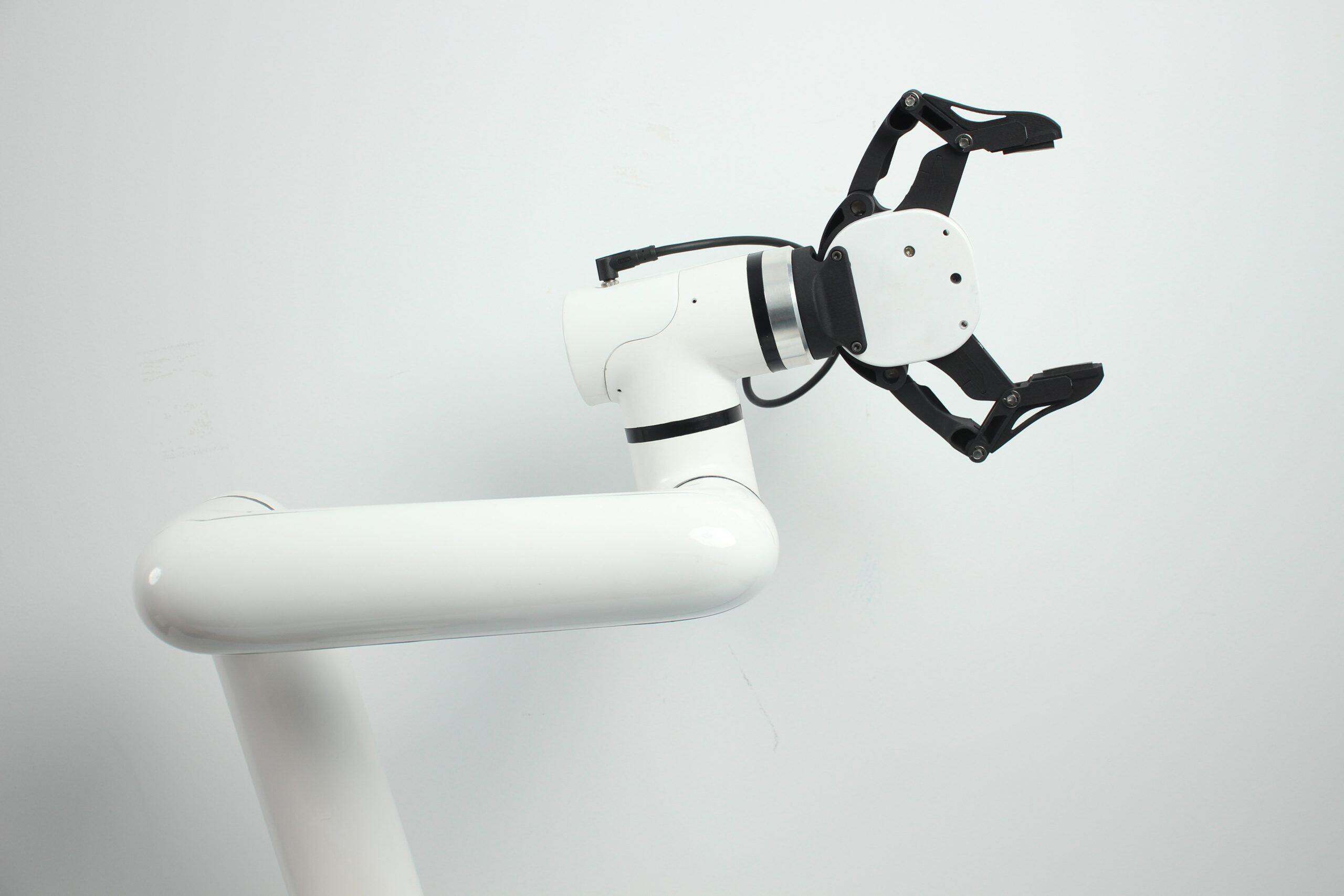
Parallel Gripper
The gripper enables precise gripping and manipulation of objects within a confirmed range of the gripper's fingertips, suitable for fine-tuned applications.
Applicable products

myCobot 280
mechArm 270

myPalletizer 260

myArm 300
Product parameters
| Model | myCobot Parallel gripper |
| Manufacturing Process | ABS |
| Color | White |
| Clamp Size | <20mm |
| Clamp force | 80g |
|
Positioning precision |
±1mm |
|
Working lifespan |
1 year |
|
Power |
Electric |
|
Drivetrain |
Gear + Linkage |
| Size | 66*78*46mm |
| Weight | 90g |
| Fixed | LEGO connector |
| Environment of use | RTP(Room Temperature and Pressure) |
| Control |
Serial control |
| Compatible devices | ER myCobot 280 Series ER myPalletizer 260 Series ER mechArm 270 Series ER myBuddy 280 Series ER myArm 300 |

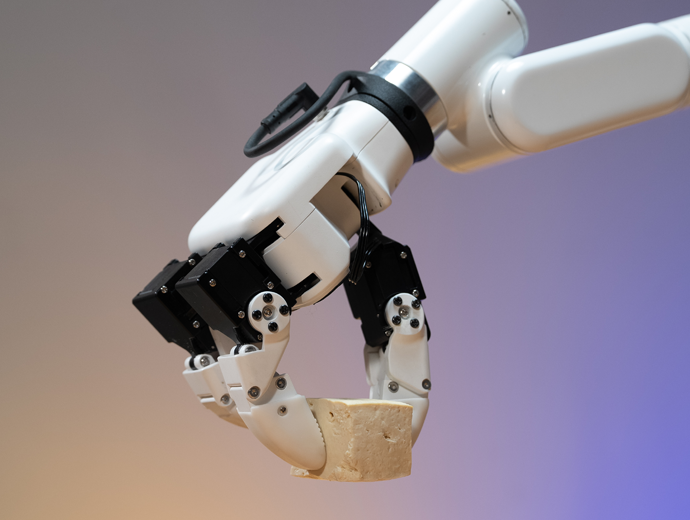
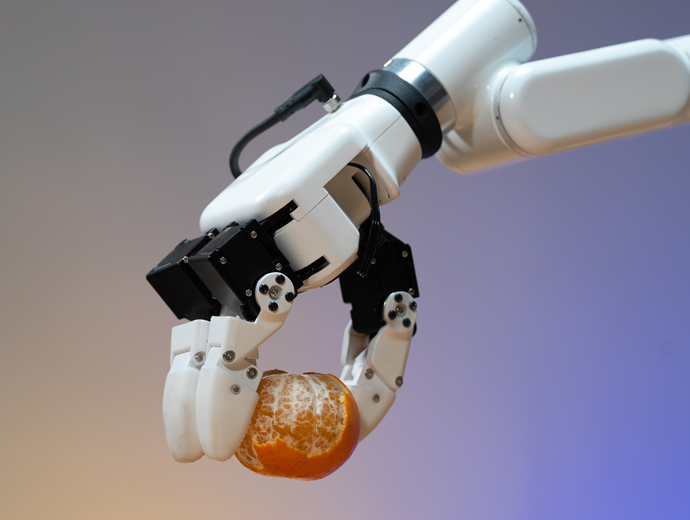
myGripper H100
myGripper H100 is a three-finger dexterous robotic hand developed by Elephant Robotics specifically designed for applications in robotics research, education, and other related scenarios.
Applicable products

Product parameters
| Name | myGripper H100 |
| Payload | 500g |
| Self-Weight | 780g |
| Stroke (Diameter) | 0 – 130mm |
| Motion Speed | 60 degrees per second per joint |
| Number of Fingers | 3 fingers (corresponding to the human thumb, index finger, and ring finger) |
| Movable Joints | 6 |
| Motor Type | Servo motor supporting current, position, and speed control |
| Lifespan | 1,000,000 cycles or more |
| Electrical Interface | M8 Pin aviation connector |
| Power Parameters | 24V, 2A |
| Communication Interface | RS485 |
| Communication Speed | Above 50Hz |
| Data Format | Hexadecimal (Hex), 8N1 |
| Protocol Type | MODBUS |
| Programming Language | Python |
| Simulation Software | ROS (RViz) |
| Recommended Control Methods | Single-finger press: thumb, index finger, or middle finger Two-finger pinch: thumb + index finger, or thumb + middle finger Two-finger clamp: index finger + middle finger Three-finger grasp: thumb + index finger + middle finger |
| Compatible Models | myCobot Pro 630, Mercury series |
| Main Control Chip | ESP32 |
| Main Control Parameters | 240MHz dual-core, 600 DMIPS, 520KB SRAM, Wi-Fi, dual-mode Bluetooth |
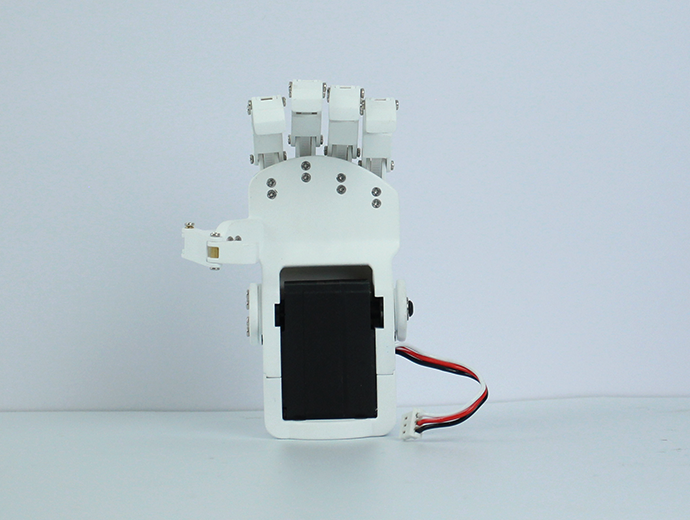
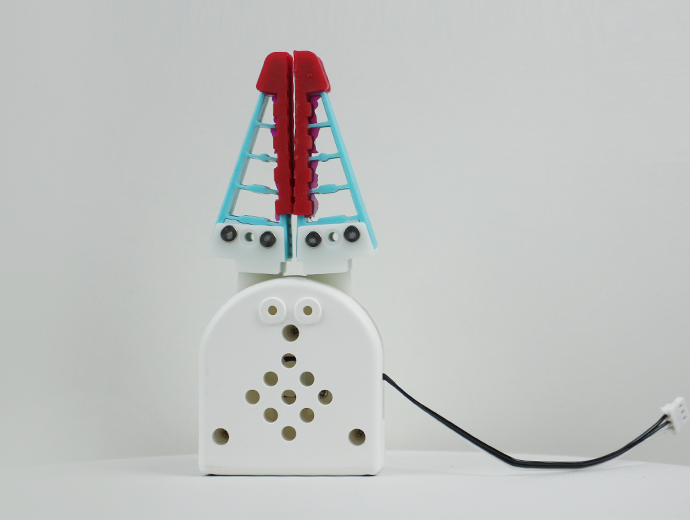
Dexterous Hand
Adopting a one-to-one humanoid design, it has 14 movable joints and can be equipped with various robotic arms to simulate the opening and closing of a human hand.
Applicable products

myCobot 280

mechArm 270

myArm 300
Product parameters
| Model | myCobot Dexterous hand |
| Manufacturing Process | 3D |
| Color | White |
| Clamp Size | 20-45mm |
| Clamp force | 100g |
| Working lifespan | 1 year |
| Power | Electric |
| Drivetrain | Gear + Linkage |
| Fixed | LEGO connector |
| Environment of use | RTP(Room Temperature and Pressure) |
| Control | Serial control |
| Compatible devices | ER myCobot 280 Series ER mechArm 270 Series ER myBuddy 280 Series ER myArm 300 |

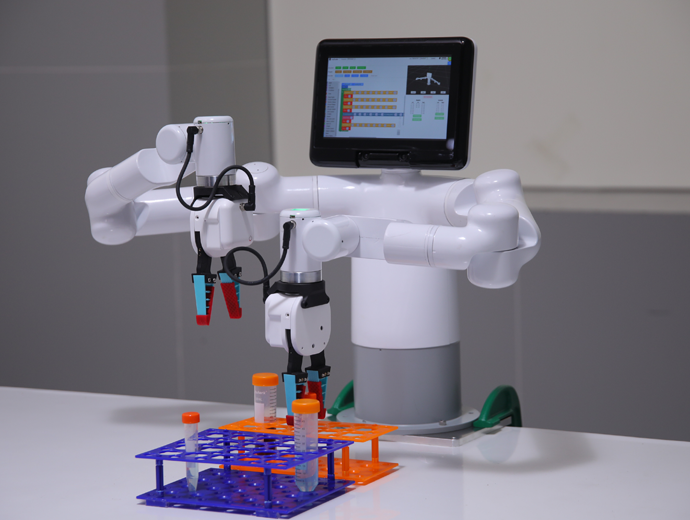
myGripper F100
The myGripper F100 is a high-performance robotic end-effector designed for versatile gripping tasks. Manufactured with PC and PBT materials using precise injection molding, it ensures durability and reliability.
Applicable products

myCobot Pro 630
Mercury B1

myCobot 320
Product parameters
| Name | myGripper F100 | Weight | 340 g |
| Material | PC, PBT | Operating Voltage | 24V |
| Manufacturing Process | Injection molding | Interface Model | M8-8PIN |
| Stroke (Diameter) | 0-100 mm (default fingertip spacing) | Mounting Method | Screw-mounted |
| Rated Payload | 500 g, multi-level adjustable | Operating Environment Requirements | Normal temperature and pressure |
| Repeated Positioning Accuracy | ±0.5mm | Control Interface | MODBUS-RTU based on RS485 bus, IO control, Button control |
| Lifespan | 300,000 opening/closing cycles | Robot Compatibility | ER myCobot 320 Series ER Mercury A/B/X Series ER myCobot Pro 600 ER myCobot Pro 630 Other general-purpose robots |
| Drive Type | Electric | ||
| Transmission Method | Gear + linkage | ||
| Dimensions | 156×106×61 mm |

myCobot Pro Adaptive Gripper
The upgrade adaptive gripper provides greater clamping force, and supports multiple programming environments, suitable for various industrial robotic arms.
Applicable products

myCobot 320
myCobot Pro 600
Product parameters
| Model | myCobot Pro Adaptive gripper | Hardware connection method | Screws |
| Payload | 1kg | ||
| Stroke | 0-90mm | Power | Electric |
| Positioning precision | ±0.5mm | Materials | Mental |
| Size | 158*105*55mm | Transmission | Gear + connecting rod |
| Weight | 350g | Working lifespan | 1 year |
| Control interface | Serial/IO interface | Working environment requirements | -5-45℃ |

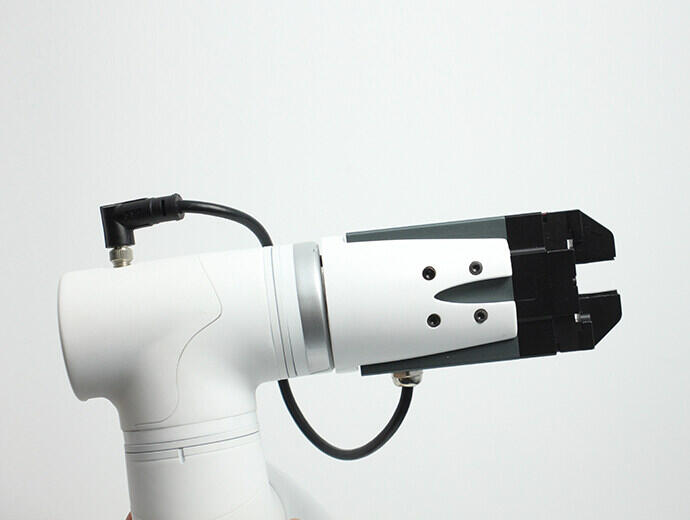
myCobot Pro Electric Parallel Gripper
The compact structure and multiple connecting holes make the gripper meet different installation conditions. It supports IO and serial port control, suitable for various industrial robotic arms.
Applicable products
myCobot 320

myCobot Pro 600
Product parameters
| Model | myCobot Pro Electric parallel gripper | Hardware connection method | Screws |
| Payload | 100g | ||
| Stroke | 0-14mm | Power | Electric |
| Positioning precision | ±0.02mm | Materials | Mental |
| Size | 97*62*31mm | Transmission | Rack and pinion + ball linear guide |
| Weight | 450g | Working lifespan | 1 year |
| Control interface | Serial/IO interface | Working environment requirements | -5-45℃ |

myCobot Pro Air Parallel Grippers
Driven by gas and working with solenoid valve, it is convenient to be controlled and the fingertip of the gripper can be exchanged for users' secondary development.
Applicable equipment

myCobot 320

myCobot Pro 600
Product parameters
| Model | myCobot Pro Air parallel gripper | Hardware connection method | Screws |
| Payload | 1kg | ||
| Stroke | 0-8mm | Power | Air compressor |
| Positioning precision | ±0.01mm | Materials | Mental |
| Size | 67.3*38*23.6mm | Working lifespan | 1 year |
| Weight | 180g | Working environment requirements | -5-45℃ |
| Control interface | IO interface |