

The myController S570 is a portable exoskeleton designed by Elephant Robotics for motion data collection. It works with different types of robots for data capture, remote control, and development. This device helps researchers, developers, and educators easily apply robotics in practical and learning scenarios.
Application Scenarios

Research and Development
____
The S570 captures motion data at 100Hz, ensuring precise AI training and efficient robotic motion capture. Its advanced data processing capabilities make it ideal for handling complex scenarios in research and algorithm development, providing a
solid foundation for innovation.
Education and Training
____
The S570 works seamlessly with robots of various DOFs, offering a flexible platform for hands-on learning. It enables intuitive robot control, helping students and researchers quickly understand
robotics while promoting engaging and
accessible education.
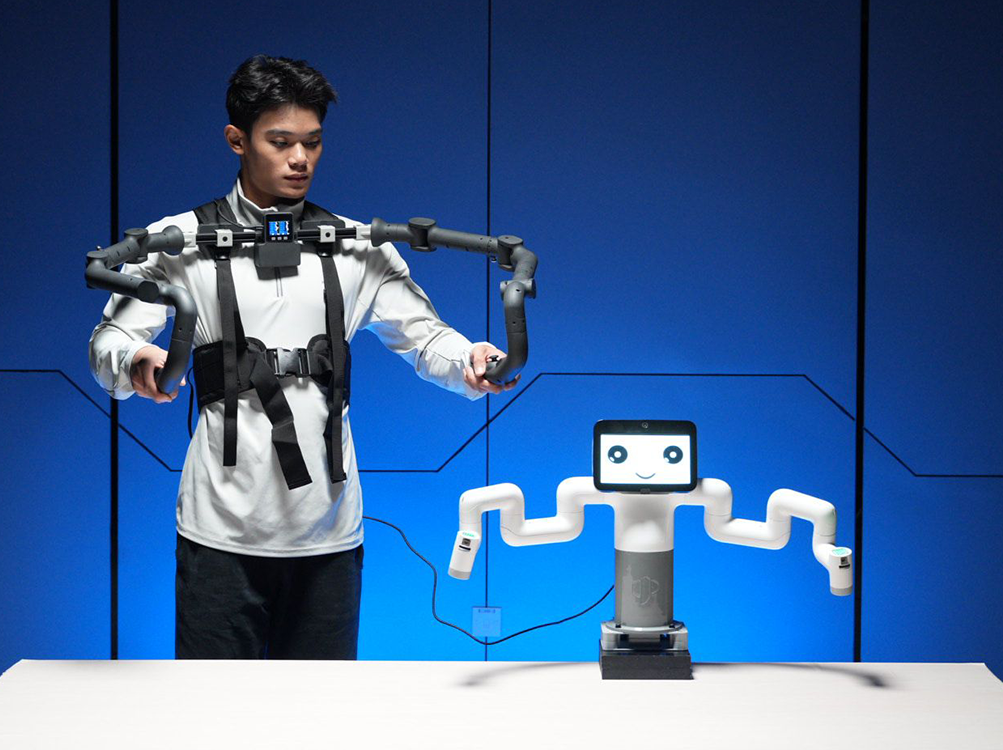

Robotic Teleoperation
____
With Python libraries and ROS support, the S570 simplifies robot integration for motion data
collection and remote control. Its standardized formats and open-source tools make teleoperation easy, even for beginners.
Case control presentation
myAGV & myCobot 280
myArm M750
Mercury X1
Product Highlights
Comprehensive Data Collection
The S570 collects motion and environmental data, making it versatile for a wide range of research and development applications.

High Precision Sensors
Equipped with 4096-resolution magnetic encoders, it ensures precise motion tracking and accurate replication of movements.

High-Speed Sampling
With a 100Hz sampling rate, the S570 captures
data quickly and accurately, even in high-speed motion scenarios.

Multi-Connection Options
Supports USB, Bluetooth, and wireless connectivity, offering flexibility for different environments, from stable indoor setups to remote outdoor use.

Real-Time Feedback
A built-in 2-inch LCD screen provides live updates on device status, helping users monitor and adjust operations as needed.

Modular and Customizable
The modular design allows for easy upgrades and maintenance, with customizable configurations to meet specific user needs.
Product package

myController S570 ×1
—————————————————————————————————————
8.4V Power Adapter ×1
—————————————————————————————————————
USB Data Cable ×1
—————————————————————————————————————
Software programming
Provides a standardized robot driver library via PyPI, supporting queries for joint angles, Cartesian coordinates, and more.Supports both ROS1 and ROS2, with RViz simulation and real-time robot state display.

Python

ROS
| Name | myController S570 – Exoskeleton Controller |
| DOF | 12 (6+6) |
| Arm Reach | 570mm per arm |
| Total Span | 1500mm |
| Weight | 1.5kg |
| Power Supply | 8.4V, 2A |
| Rotation Range | ±180° |
| End Actuator | Dual-finger grip with two buttons and a joystick |
| USB Connection | Type-C |
| LCD Display | 2.0″ @ 320×240, IPS panel, 853 nits max brightness |
| Data Rate | Up to 100Hz |
| Main Controller | ESP32 (Basic), 240MHz dual-core, 600 DMIPS, 520KB SRAM, dual-mode Bluetooth and Wi-Fi |
| Auxiliary Controller | ESP32 ×2 (Atom), 4MB Flash, 5×5 LED Matrix |
| Interfaces | Provides access to joint position, speed, acceleration, button status, joystick state, gyroscope data, and customizable LED colors (read/write). |
| File Formats | Supports 3D-Step and 2D CAD files |
| Current Position | Read |
| Current Speed | Read |
| Current Acceleration | Read |
| Button Status | Read |
| Joystick State | Read |
| Gyroscope Data | Read |
| LED Light Color | Read/Write |