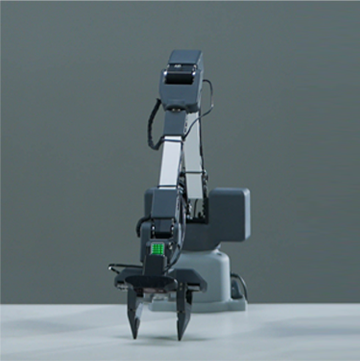
myArm M&C四足机器人复合套件 产品特性 应用场景 四足机械臂复合套件结合了四足机器人的灵活移动能力和机械臂的操作精度,提供了一个通用的适合探索、研究和多环境应用的高度集成化平台。 如:复杂地形探索模拟; 自动化农业应用探索; 实验室或教室教学。 产品功能 四足机器人与机械臂集成 提供多维度操作能力,模拟复杂环境下的任务执行。 便捷安装和连接 简化设置过程,无需外置控制器即可快速启动。 支持多种开发环境 包括Python和ROS,满足不同开发需求。 平衡算法验证 提高机器人的稳定性和操作精度。 动力学开发支持 适用于高级运动分析和应用开发。 标准化通信协议 确保设备间高效、稳定的数据交换。 产品包装内容 myArm C650机械臂 X 1 ———————————————————————————————————————— myArm M750机械臂 X 1 ———————————————————————————————————————— 四足机器狗 X 1 ———————————————————————————————————————— 24V5A电源适配器 X 1 ———————————————————————————————————————— 12V5A电源适配器 X 1 ———————————————————————————————————————— USB数据线 X 2 ———————————————————————————————————————— DC电源转接线 X 1 ———————————————————————————————————————— 软件编程开发 myArm系列机械臂在教育和科研领域中极具价值,特别是在Python和ROS(Robot Operating System)这两个广泛使用的开发环境中。这些环境提供了强大的支持,使得myArm系列产品能够广泛应用于机器学习、长征娱乐研究、复杂运动控制以及视觉处理任务中。 Python ROS myArm M&C双臂遥操作机械臂套件 机器人双臂遥操作实时控制套件 了解更多 myArm M&C 具身人型复合套件 具身人型双臂遥控机器人控制套件 了解更多 myArm C650 通用型6自由度机器人运动信息采集装置 了解更多 myArm M750 通用型智能6自由度机械臂 了解更多 myArm M&C 四足机器人复合套件 通用型四足机械臂复合机器人套件 了解更多