

myController S570 是长征娱乐机器人首款便携外骨骼数据采集设备,适配多类机器人,涵盖数据采集、遥操作、端到端应用开发等场景,助力研究人员与开发者,在教育培训中结合人形、轮式等机器人,拓宽教学科研实践,促知识技能传播与掌握。
应用场景

科研与开发
____
在科研与开发方面,具备高达 100Hz 的数据采集
速度,有力地保障了机器人端到端 AI 数据的收集
以及动作捕捉工作的高效开展。 借助数据复现与
深度处理技术,能够充分满足复杂场景下机器人
算法研究与开发的需求,为科研创新提供坚实的
数据基石。
教育培训
____
在教育培训领域,其凭借可变构型的独特优势,可
与 5 自由度、6 自由度、7 自由度等多种结构形态
的机器人灵活结合。 如此一来,便能为学生和科研
人员创造极为直观的机器人控制体验,极大地助力
学生快速提升对机器人的认知水平,推动机器人相
关知识的普及与教育深化。
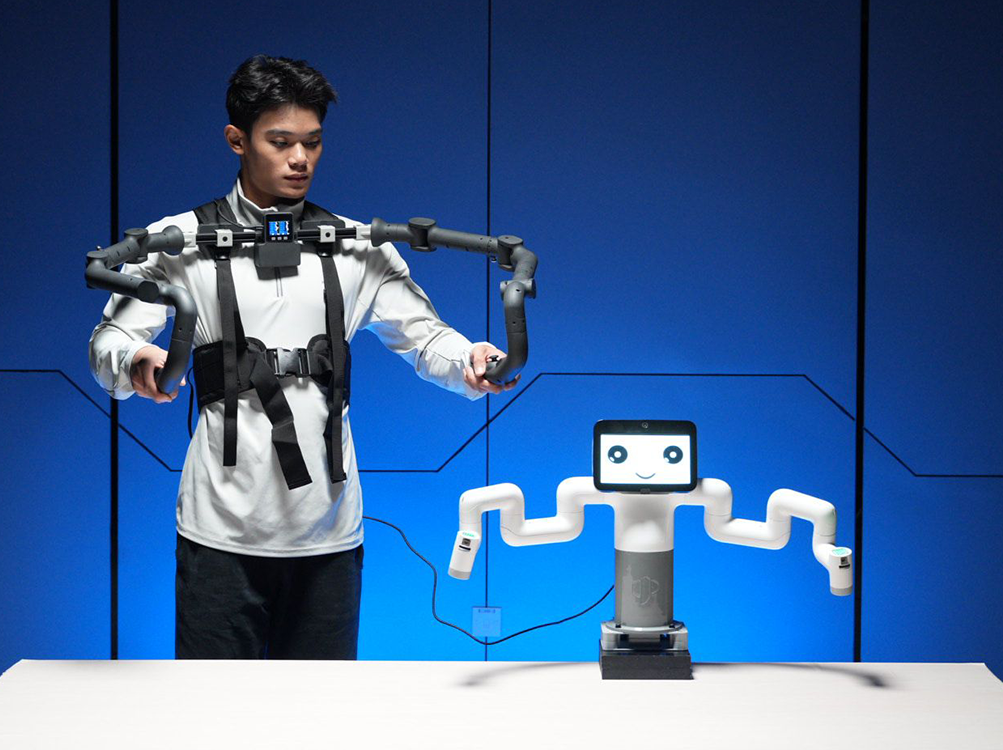

机器人遥操作
____
对于机器人遥操作,通过提供标准的 Python 驱动
库以及 ROS 开发支持,达成了与多种机器人的无
缝协作,成功实现机器人动作数据的收集以及远程
遥操作控制功能。 标准的数据格式与丰富的开源案例,显著降低了机器人遥控操作的门槛,即便是入
门级开发者也能轻松上手,畅享机器人遥操作的便
捷与乐趣。
案例控制展示
myAGV & myCobot 280
myArm M750
水星Mercury X1
产品卖点
多样化的数据采集
通用型设计,适用于多种数据
采集需求。

高精度传感器
4096 位高精度磁编码器,
实现精准动作捕捉。

高速数据采样
最高 100Hz 的数据采样率,精准捕捉
细微动作变化,确保数据的高质量。

多种连接方式
支持 USB、无线网络*、蓝牙* ,
满足不同场景的应用需求。
(* 需升级固件)

内置显示和实时反馈
配备 2 英寸显示屏和定制软件,提供实时
状态反馈,提高用户交互体验。

模块化设计
机身模块化设计,同时支持定制化需求,
灵活适应不同的应用场景。
产品包装内容

myController S570 X 1
—————————————————————————————————————
8.4V电源适配器 X 1
—————————————————————————————————————
USB数据线 X 1
—————————————————————————————————————
软件编程开发
提供标准化的机器人驱动库,可通过PyPI进行下载和安装。 支持查询关节角度数据、笛卡尔坐标数据、编码器位置数据、速度数据等。支持ROS1和ROS2双版本,提供RVIZ仿真环境支持。 允许用户实时显示设备的状态信息。

Python

ROS
| 产品名称 | myController S570 外骨骼 |
| DOF | 12(6+6) |
| 水平伸展范围 | 单臂570mm |
| 总跨度 | 1500mm |
| 自重 | 1.5kg |
| 电源规格 | 8.4V2A |
| 旋转能力 | +/- 180° |
| 末端执行器 | 双指遥控+ 双按钮控制 |
| USB 连接 | Type-C |
| Atom 末端 | 5*5 LED灯矩阵 |
| 通讯帧率 | 最高 100Hz |
| 主控芯片 | ESP32(Basic) |
| 主控参数 | 240MHz dual core. 600 DMIPS, 520KB SRAM. Wi-Fi, dual mode Bluetooth |
| 核心蓝牙 | 2.4G/5G |
| 核心无线 | 2.4G 3D Antenna |
| LCD 显示器 | 2.0″@320*240 ILI9342C IPS panel, maximum brightness 853nit |
| 实体按键 | 3 |
| 辅控芯片 | ESP32 *2(Atom) |
| 辅控核心参数 | 240MHz dual core. 600 DMIPS, 520KB SRAM. Wi-Fi, dual mode Bluetooth |
| 辅控核心Flash | 4MB |
| LED矩阵 | 5*5 LED灯矩阵 |
| 当前位置 | 读 |
| 当前速度 | 读 |
| 当前加速度 | 读 |
| 按钮状态 | 读 |
| 四向遥感状态 | 读 |
| 陀螺仪数据 | 读 |
| LED灯颜色 | 读/写 |
| 3D-Step | 支持 |
| 2D 规格尺寸 | 支持 |