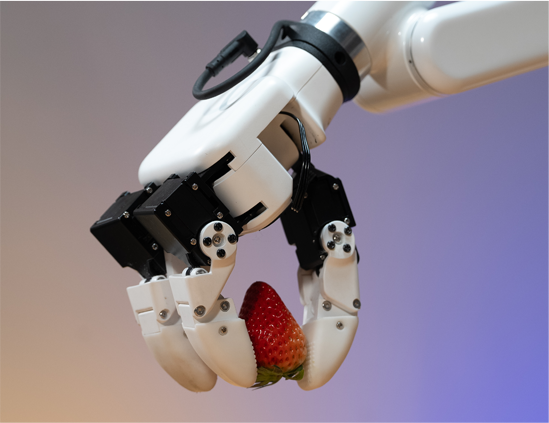
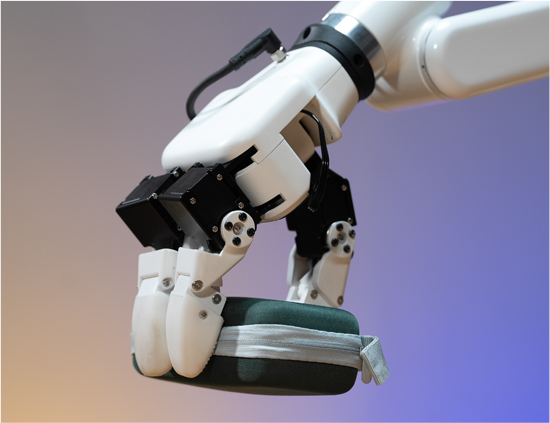
| 产品名称 | myGripper H100 三指力控灵巧手 |
| 负载能力 | 500g |
| 自重 | 780g |
| 握持范围 | 0 – 130mm |
| 运动速度 | 单关节60 度每秒 |
| 指尖数 | 3指,分别对应人手的:拇指 食指 无名指 |
| 可活动关节 | 6个 |
| 电机类型 | 伺服舵机,支持电流、位置、速度控制 |
| 使用寿命 | 10W次及以上 |
| 电气接口 | M8 Pin 航空插头 |
| 电源参数 | 24V2A |
| 通信接口 | RS485 |
| 通信速度 | 50Hz以上 |
| 数据类型 | Hex 16进制 ,8N1 |
| 协议类型 | MODBUS |
| 编程语言支持 | Python |
| 仿真软件支持 | ROS(RVIZ) |
| 建议控制方式 | 单只点按 拇指、食指、中指
双指捏合 拇指+食指、拇指+中指
双指夹持 食指+中指
三指握持 拇指+食指+中指 |
| 适配机型 | myCobot Pro 630、Mercury 系列 |
| 主控芯片 | ESP32 |
| 主控参数 | 240MHz dual core. 600 DMIPS, 520KB SRAM. Wi-Fi, dual mode Bluetooth |