

myGripper F100 力控夹爪是一款高性能的机器人末端执行器,专为多功能抓取需求而设计。采用PC、PBT材料,经过精密注塑工艺制造,确保产品的坚固性和耐用性。夹爪的夹持范围为0-100毫米(默认指尖),支持多档力矩调节,满足不同力度的抓取需求。额定负载为500克,重复定位精度达0.5毫米,可适应各种机器人夹取操作场景。
应用场景
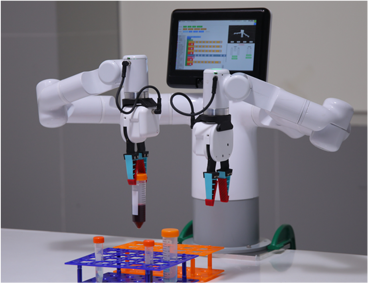
实验操作
在科研实验中,完成试管、器皿等的抓取
和移动,
确保实验的安全和准确性。

教育演示
作为教学工具,帮助学生理解机器人
抓取原理,
培养实践能力。

物料搬运
在模拟生产线或仓储中,搬运各种规格的
物料,提高
工作效率。
产品卖点
多档力控调节
支持多档位力控调节,满足不同
力度需求,保护被抓取物品。

高精度与耐用性
重复精度达0.5毫米,使用寿命高达
30万次开合,保证长期稳定运行。

多种控制方式
支持MODBUS-RTU通信协议,
IO控制和按键控制,操作灵活方便。

广泛兼容性
采用标准M8-8PIN接口,适配多款
机器人型号,快速集成,无缝对接。

轻量化设计
重量仅340g,减少机器人末端负载,
提高整体工作效率。

安全可靠
工作电压24V,符合工业安全标准,
适用于常温常压环境。
产品包装内容

myGripper F100 力控夹爪 *1
—————————————————————————————————————
USB转485模块*1 、 USB数据线*1
—————————————————————————————————————
M5 USB 固件升级模块 *1
—————————————————————————————————————
myCobot Pro 力控夹爪柔性指尖 *2
—————————————————————————————————————
8PIN 航空插头转散线2m长 *1
—————————————————————————————————————
双头 8PIN 航空插头 连接线 *1
—————————————————————————————————————
软件编程开发
提供标准化的机器人驱动库,可通过PyPI进行下载和安装。 支持查询关节角度数据、笛卡尔坐标数据、编码器位置数据、速度数据等。支持ROS1和ROS2双版本,提供RVIZ仿真环境支持。 允许用户实时显示夹爪的状态信息。

Python

ROS
| 产品名称 | myGripper F100 力控夹爪 |
| 材料 | PC、PBT |
| 工艺 | 注塑 |
| 夹持范围 | 0-100毫米(默认指尖) |
| 额定负载 | 500 克,支持多档调节 |
| 重复精度 | ±0.5毫米 |
| 使用寿命 | 30W 次 开合 |
| 驱动方式 | 电动 |
| 传动方式 | 齿轮+连杆 |
| 尺寸 | 156*106*61mm |
| 重量 | 340g |
| 工作电压 | 24V |
| 接口型号 | M8-8PIN |
| 固定方式 | 螺丝固定 |
| 使用环境要求 | 常温常压 |
| 控制接口 | MODBUS-RTU 基于RS485总线 IO控制 按键控制 |
| 适用设备 | ER myCobot 320系列 ER Mercury A/B/X系列 ER myCobot Pro 600 ER myCobot Pro 630 其他通用机器人 |