生涯カスタマーサポート
いつでも support@zjzmjcyxgs.com までご連絡ください。





















本日ご注文ください。配達予定日は から までです。
このグリッパーは、グリッパーの指先が確認できる範囲内の物体を正確に把持し、操作することが可能で、細かな用途に適しています。myCobot 280 M5Stack、myCobot 280 Pi、myCobot 280 For Arduino、myCobot 280 Jetson Nano、myPalletizer 260 M5Stack、myPalletizer 260 Pi、mechArm 270 M5、mechArm 270 Pi、myBuddy 280に使用できます。


当社は、DHL、FedEx、UPS、USPS、YunExpress の運送業者を利用して世界中に発送します。

輸入商品/サービスには税金が適用される場合があり、その国の法律によって規制されています。Elephant Robotics Shopは、製品に課されるタックスインボイスについて一切責任を負いません。適用されるポリシーと税率は国によって異なります。
輸入税や関税の払い戻しを受けられる場合があります。ただし、払い戻しを受けるには地方自治体または当局への個人申請が必要であり、弊社ではこの手続きをサポートできません。
![]()
ご注文の処理には通常 7 ~ 15 営業日かかります。
この時間枠には、注文の確認、品質管理措置、梱包が含まれます。
支払いが遅れると、処理時間が長くなります。
通常、木曜日に発送いたします。
商品は15営業日以内に国際エクスプレスで配送されます。
配送方法と配送時間は商品や国によって異なります。
複数の商品をご注文いただいた場合、ご注文商品が複数回に分けてお届けする場合があります。これは、ご予約商品にも当てはまります。その場合も、送料は1回分のみ請求させていただきます。
国際物流における遅延や不具合を避けるため、配送先情報は必ず英語でご入力ください。配送料は、お客様の配送先住所に基づき、チェックアウト時に自動的に請求されます。
例:
名称:深センエレファントロボティクステクノロジー株式会社
住所:ブラックマークインターナショナルスマートハードウェアイノベーションセンターD5F05号室
都市: 深セン
州: 広東省
郵便番号: 518035
電話: +86(0769)-8696-8565
メールアドレス: info@zjzmjcyxgs.com
国によって異なる商品の配送料は異なります。
注文の支払い時に表示される送料を参照するか、配送ポリシーを確認してください。
ご注文が正常に完了すると、ご注文の詳細を確認する注文確認メールが届きます。
商品が発送されると、注文番号、速達情報、荷物の追跡番号が記載された発送通知メールが届きます。また、メールで注文状況を追跡することもできます。
注文の変更、返金処理、発送の更新などに関する情報もメールでリアルタイムに通知されます。
注記:
返品:ご注文商品到着後7日以内に未開封の商品をご返品ください。返品にかかる送料やその他のリスクはお客様のご負担となります。
保証:保証期間内に通常使用で故障した場合は、無料で修理いたします。保証の詳細については、 「保証と返品について」をご覧ください。
違い
myCobot-M5、myCobot-Pi、myCobot-Jetson Nano、myCobot for Arduino の違いは何ですか?
ロボットアームは機械アームの一種です。通常はプログラム可能で、人間の腕の機能を統合します。このようなアームは通常、回転または並進移動を可能にする関節で接続されています。
ロボットアームは、現代の生産プロセスにおいて、特定のタスクや作業を迅速かつ効率的に、そして極めて正確に実行できる、かけがえのない装置です。ロボットアームに関する最も初期の研究は、1940年代に遡ります。当時、米国のアルゴンヌ国立研究所とオークリッジ国立研究所は、放射性物質の取り扱いに遠隔操作型ロボットアームを使用していました。70年にわたる開発を経て、ロボットアームは、切断、組み立て、パレタイジング、スプレー塗布などの作業に加え、医療手術、航空宇宙探査、軍事偵察などにも使用される最も一般的な機械装置の一つとなっています。
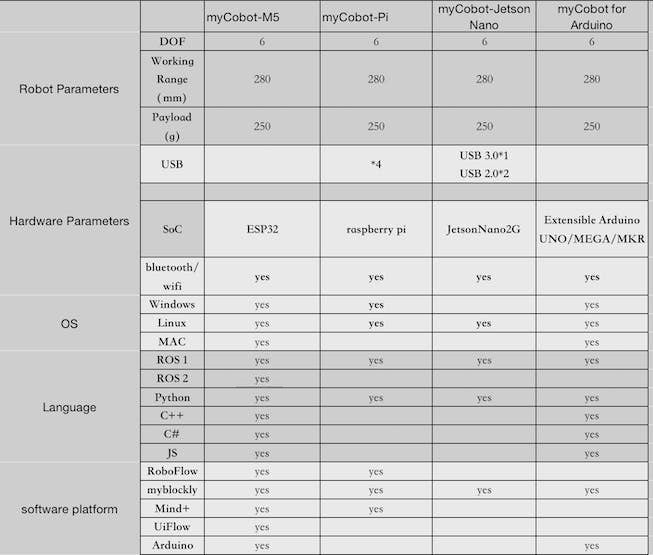
2020年に発表されたmyCobot-M5は、デュアルディスプレイ画面を備えたM5 Stack Atom & Basic ESP32を搭載し、より高速な視覚的な操作と作業状況の監視をサポートしているため、MyCobot-M5のプログラミングはすべてのユーザーにとってシンプルで簡単です。メインコントローラー、通信モジュール、センサー、アクチュエーターなど、IoTモジュールをフルラインナップするM5 Stack Atom & Basic ESP32をベースにしたMycobot-M5は、高性能、信頼性、拡張性を重視するユーザーに最適です。実用ケースは、工具を運ぶスタジオヘルパーからケーキを焼くキッチンアシスタントまで多岐にわたります。M5 Stackオープンプラットフォームでは、ユーザーはオープンソースハードウェア、APIインターフェース、多様な連携形態をより費用対効果の高い方法で閲覧・検索できます。

myCobot-Piは、 1.5GHz 4コアCPUを搭載したRaspberry Pi 4Bを搭載し、Debian/Ubuntuプラットフォームで動作します。ROSとブロック型ビジュアルプログラミングを内蔵し、比較的高いスケーラビリティを実現しています。最も手頃な価格のポータブルプロセッサとして評価されています。Raspberry Piは、低価格のハードウェアと無料ソフトウェアを用いて、学校での基礎的なコンピュータサイエンス教育を促進することを目指しており、ユーザーはRaspberry Pi PressとRaspberry Pi Foundationの支援を受けて、フレンドリーな教育コミュニティを楽しむことができます。コンピューティング、ゲーム、そしてRaspberry Piという使いやすいプラットフォームに刺激的なコミュニティが多数存在するこのバージョンは、Pythonを学びたい初心者や軽量プラットフォームを構築したい人から、STEM教育者や更なる研究を求める機関まで、幅広いユーザーに適しています。

myCobot-Jetson Nano Jetson Nano AIボードをベースにカメラを搭載したmyCobot 280 Jetson Nanoは、迅速な画像処理、ロボットアルゴリズム開発、ROSシミュレーション学習などが可能です。強力な小型人工知能コンピューターであるため、システムイメージが入ったmicroSDカードを挿入するだけで起動でき、初心者の開発を簡素化します。さらに、Jetson Nanoボードには、より高性能で強力なGPU(グラフィックスプロセッシングユニット)が搭載されており、my Robot Piと比較して、アイインハンドロボットプロジェクトでより良い成果が得られ、より高度な研究開発が可能になります。Deepstream、Vision AIアプリケーションおよびサービスなどのNvidiaの強力なSDKと組み合わせることで、開発者にとってAIとロボットの学習を深めるための理想的なバージョンとなります。これにより、myCobot-Jetson Nanoの二次開発の可能性が高まります。

l myCobot for Arduinoは、複数のArduinoまたはArduinoライクなボードや拡張機能と互換性があります。Arduinoソフトウェアは初心者には使いやすく、上級ユーザーにも十分な柔軟性を備えています。他のほとんどのマイクロコントローラーシステムはWindowsに限定されていますが、Arduinoソフトウェア(IDE)は、Windows、Macintosh OSX、Linux OSを含むクロスプラットフォームで動作します。このバージョンは、ロボットアームの整合性に焦点を当て、ユーザーの研究開発の簡素化を向上させることに重点を置いています。さまざまなArduinoボード(MKR WiFi 1010、UNO、Mega 2560など)と拡張可能なソフトウェアから選択できるため、開発者と設計者は、要求を満たす独自のmyCobotを作成できます。myCobot for Arduinoはよりオープンで明確な開発環境を提供するため、開発者は必ずしもPCB'A(プリント回路基板アセンブリ)に依存せずにボードを設計することさえできます。さらに、教室に革新をもたらしたいと考えている教師のために、Arduino Education は、教育者に必要なハードウェアおよびソフトウェア ツールを提供します。

詳細はこちら: https://shop.zjzmjcyxgs.com/blogs/news/which-mycobot-is-suited-for-you
より多くの選択肢
A1: もちろんです。弊社のAPI(Python、C++、C#、Javascript)を使用して、myCobotを直接またはリモートで制御したり、オープンソースのROSコードを直接操作したりすることができます。
A2:
myCobot M5を使用すると、
ハードウェア: ESP32 ベースの組み込みマイクロコントローラ、モーターおよびステアリング ギア、M5Stack Basic/Atom。
ソフトウェア: Arduino、UiFlow、Myblockly、Mind+、RoboFlow、C#、C++、Python、Javascript、ROS、MoveIt、通信データ、仮想マシン、Linux (ビジュアル システム)。
myCobot PiとmyArmを使えば、
ハードウェア: マイクロプロセッサ、モーター、ステアリングギア。
ソフトウェア: Myblockly、Mind+、RoboFlow、C#、C++、Python、Javascript、ROS、MoveIt。
A4:
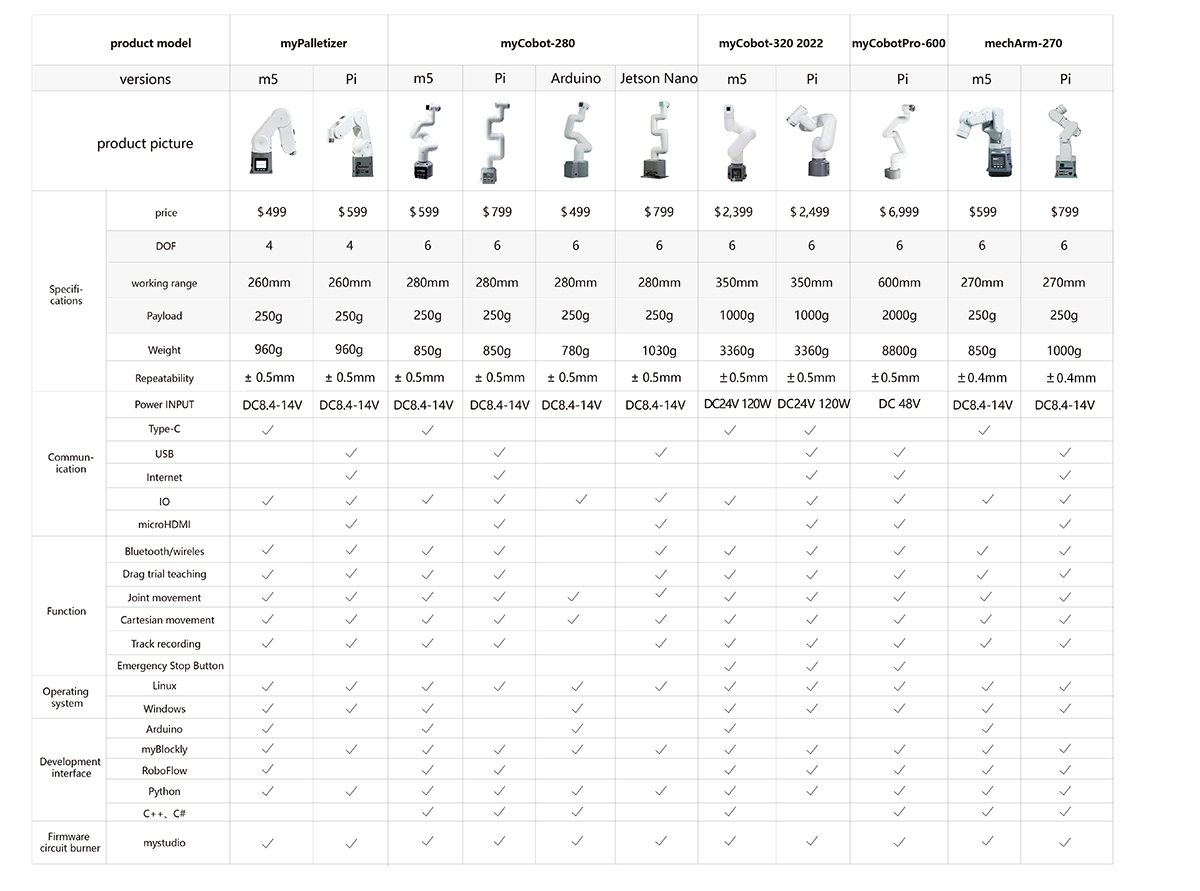
myArm 300 PI 2023:ペイロードは200g、動作範囲は300mmです。
myCobot 280: myCobot の正味重量は 850g、積載量は 250g、動作範囲は 280mm です。
マイコボット320: myCobot の正味重量は 3.5kg、積載量は 1kg、動作範囲は 320mm です。
マイコボット260: myPalletizer の正味重量は 960g、積載量は 300g、動作範囲は 260mm です。
マイコボットプロ600: myCobot Pro の正味重量は 8.8kg、積載量は 2kg、動作範囲は 600mm です。
A5: 弊社ではお客様に返品・保証サービスを提供しております。 返品サービスは、商品の受領日から7日以内に未開封の商品に限ります。返品にかかる送料およびその他のリスクはお客様のご負担となります。当社は、納品された製品の保証期間中、ロボットの通常使用時に発生した故障のみを無償で修理いたします。保証内容の詳細については、製品詳細ページをご覧ください。
A6: 世界中に発送しており、FedEx、UPS、DHLの配送業者を利用しています。商品は国際エクスプレスで1~2週間以内にお届けいたします。すべての商品は標準のカートンと、衝撃による損傷を防ぐため、特注の超硬質紙ケースを使用しています。
A7: 技術に詳しくない方のために、myCobotとmyArmはドラッグティーチング機能に対応しています。これにより、必要な動作や指示をすべてティーチングできます。従来のパスポイント保存モードは廃止され、プログラミングは不要です。保存したパスは記録可能で、異なるパスを最大60分間保存できます。
A8: myArm 300の繰り返し位置決め精度は±0.5mmです。
2つの製品の位置決め精度は異なります。ER 280ロボットアームはコンシューマー向けで、主に教育分野で使用されています。1~2時間使用した後、15~30分間の休止期間を設けることをお勧めします。短時間での繰り返し位置決め精度は±0.2mmに達します。 ER 320は、繰り返し位置決め精度±0.3mmを実現し、12時間以内の商用作業に適しています。短時間使用の場合、繰り返し位置決め精度は±0.2mmにも達します。
A9: ロボットアームにはカメラは搭載されていません。ただし、マシンビジョン開発用のキットをご用意しております。
A10:
製品紹介とユーザーマニュアルのリンクは http://www.zjzmjcyxgs.com/myCobot/ です。
Github開発リンク(ソフトウェアチュートリアル)は https://github.com/elephantrobotics/myCobot/ です。
Gitbook(Web版詳細チュートリアル)はhttp://www.zjzmjcyxgs.com/docs/myCobot/
