myBuddy 280デュアルアームロボットはRaspberry Pi 4 SBCとESP32コントローラーを搭載
ボード間の内部通信を支援する 3 つの ESP32 ベースの M5Stack コア モジュールも備えています。
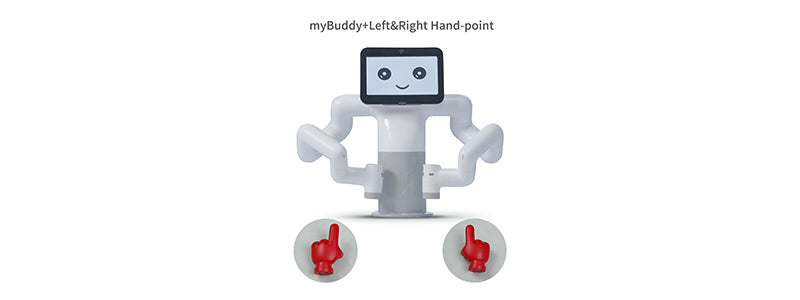
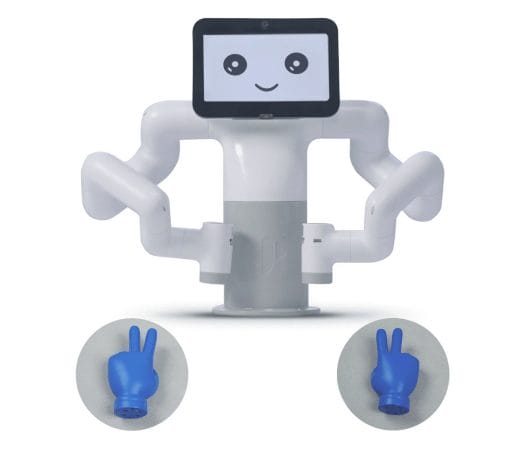
これは以前のをベースにしたものだ 従来機は片腕で動作範囲は280mmですが、新型ロボットは両腕を搭載し、合計13自由度(DoF)を実現しています。また、コンピュータービジョン用の2MP HDカメラ2台、標準の3.3V拡張I/Oインターフェース、レゴ拡張インターフェースを搭載し、吸引ポンプ、グリッパー、小型ハンド(下記参照)など、様々なアダプタを取り付けることができます。
myBuddy 280の仕様:
- SBC – ディスプレイを制御し、ESP32モジュールと通信するためのRaspberry Pi 4(2GBまたは4GB RAM)シングルボードコンピューター
- IoTモジュール – 4MBフラッシュメモリ搭載のM5Stack ESP32基本コア3個
- ディスプレイ – 7インチタッチスクリーンディスプレイ
- ビデオ出力 – HDMIポート
- オーディオ – 3.5mmオーディオジャック、HDMI経由のデジタルオーディオ
- ネットワーク – ギガビットイーサネット、デュアルバンド WiFi 5、Bluetooth 5.0 (Raspberry Pi 経由)
- USB – USBポート×1
- 自由度 – 13
- 2本の腕それぞれ
- 作業半径 – 280 mm
- 最大荷重 – 250グラム
- 再現性 – ± 0.5 mm
- 寿命 – 500 時間 (CNXSoft: かなり短い寿命のように思えます…)
- 先端に5×5のLEDマトリックス
- 機能 - 自由に移動、関節動作、直交座標動作、トラック記録、ワイヤレス制御、衝突検出
- モーターパラメータ
- 高性能サーボステアリングギア
- 関節回転範囲
- 左腕と右腕:
- J1 -165 ~ +165°
- J2 -165 ~ +165°
- J3 -165 ~ +165°
- J4 -165 ~ +165°
- J5 -165 ~ +165°
- J6 -175 ~ +175°
- ウエスト – J1 -120 ~+120°
- 左腕と右腕:
- 拡張 – 3.3V IOヘッダー、2x Groveコネクタ
- 電源 – 24V/9.2A
- 寸法 / 重量 – 該当なし

。両方の入門ガイドとROSコマンドを含むより高度な手順については、こちらをご覧ください。 ドキュメントのウェブサイト。
教育用の潜在的なアプリケーションとしては、QR コードを使用した視覚的な分類、両腕でのピアノ演奏、顔認識、VR ヘッドセットと各腕をエミュレートする 2 つのコントローラーを使用した仮想現実制御、小型の双腕ロボットで考えられるあらゆる種類の楽しいプロジェクトなどがあります。
同社まさにそのためのツールです。Windows、Linux、Mac OSで動作し、ファームウェアのアップデートも可能。ロボットの使い方に関するビデオチュートリアルや、メンテナンス・修理情報も提供しています。
も運営していますが、同社の担当者はCNX Softwareに対し、myBuddy 280を近い将来(今後3ヶ月以内)Amazonで販売する予定はないと伝えています。詳細は製品ページをご覧ください。
-
投稿された
myBuddy